URDF Import: Turtlebot#
NVIDIA Isaac Sim have several tools to facilitate integration with the ROS system. We have both ROS and ROS2 bridges, a method to import URDF, and much more. This tutorial series gives examples of how to use these tools.
Learning Objectives#
In this example, we will import a Turtlebot3 URDF into Isaac Sim.
If you already have a robot with rigged joints and properties in USD format, and you wish to jump straight into using our ROS bridges, go to the next tutorial in the series Driving TurtleBot via ROS Messages.
Getting Started#
Prerequisite
Completed ROS and ROS 2 Installation so that ROS is available, ROS extension is enabled, and necessary environment variables are set.
Basic understanding of ROS workspace.
Importing TurtleBot URDF#
Download and build the Turtlebot3 description package if you haven’t done so already. You can build it inside the ROS workspace. You can also use your own ROS workspace. If you choose to use your own workspace, make sure to source that workspace before launching NVIDIA Isaac Sim, so that the path to it is part of
ROS_PACKAGE_PATH.Navigate to the src folder of your workspace. For the next steps, we are assuming that noetic_ws from the Isaac Sim ROS workspaces is being used. Navigate to
noetic_ws/src. Then clone the turtlebot3 meta-package.git clone -b <distro>-devel https://github.com/ROBOTIS-GIT/turtlebot3.git turtlebot3
Head to root of the workspace (
noetic_ws/) and run the following command to install required turtlebot3 dependencies.rosdep install -i --from-path src --rosdistro noetic -y
Navigate to the URDF folder
noetic_ws/src/turtlebot3/turtlebot3_description/urdf/. Depending on the distro version, find either the.urdffile, or the.xacrofile forturtlebot3_burger, convert the.xacrofile to.urdffile by callingrosrun xacro xacro -o <output_name>.urdf <input_file>.urdf.xacro
If your URDF file contains calls to other ROS packages, such as when looking for mesh files of accessories, make sure the path to those ROS packages are also inside the
ROS_PACKAGE_PATHbefore launching the simulator.
We will use an Isaac environment for this tutorial, but you can import the robot into any environment of your choosing. Open the environment by going to the Isaac Sim Assets tab below the viewport, and expand the tabs on the left using the + icon Environments > Simple_Room > simple_room.usd. If you do not want to use the provided environment, just make sure there is a GroundPlane and a PhysicsScene to your environment. Both can be found in Create > Physics. You may also need some lighting, play with the various types of lighting in Create > Light to get the desired effect.
On a new stage, drag the simple_room.usd onto the stage, and place it at the origin by zero out all the Translate components in the Transform Property. You many need to zoom in a bit to see the table inside the room.
Click File > Import, then locate the URDF file and select it.
In the prompt window, select Referenced Model. Inside the Links section, set to Moveable Base. Since this is a mobile robot, change targets of wheel_left_joint and wheel_right_joint to Velocity under the Joints & Drives section so that wheels can be properly driven later.
The configuration of the robot should match the following:
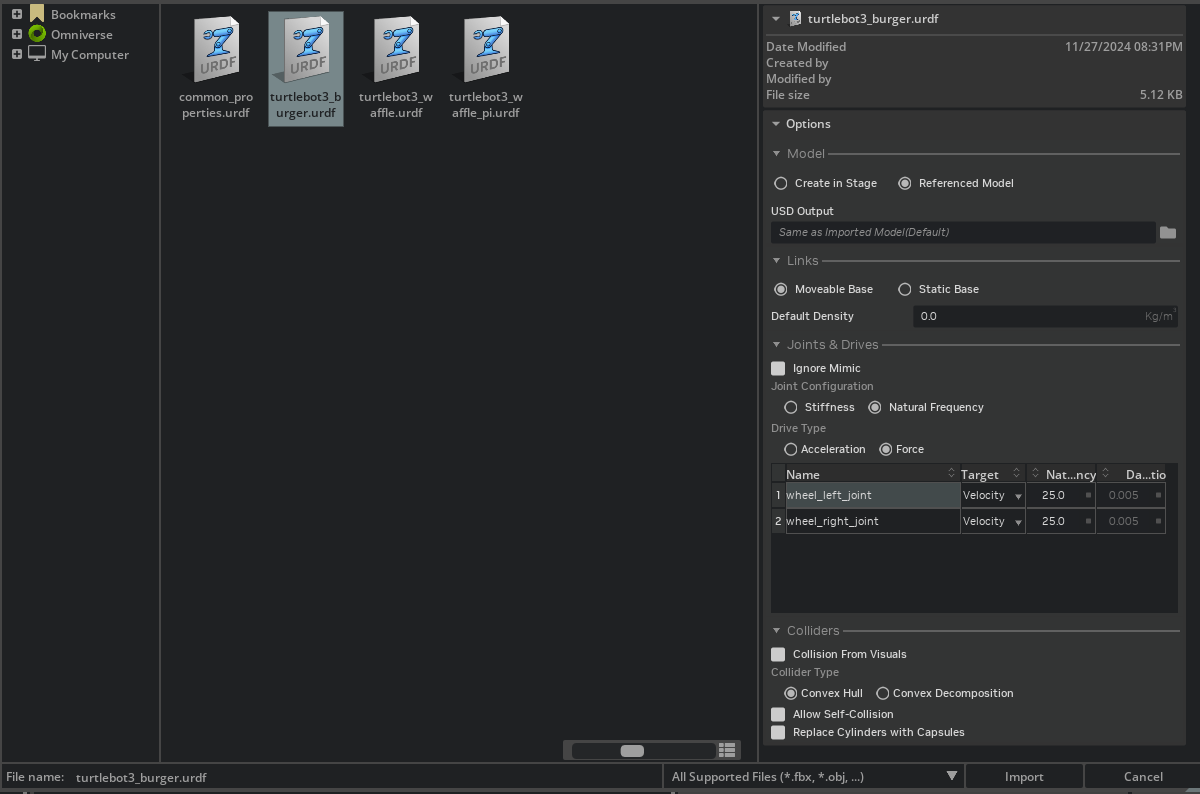
Click Import.
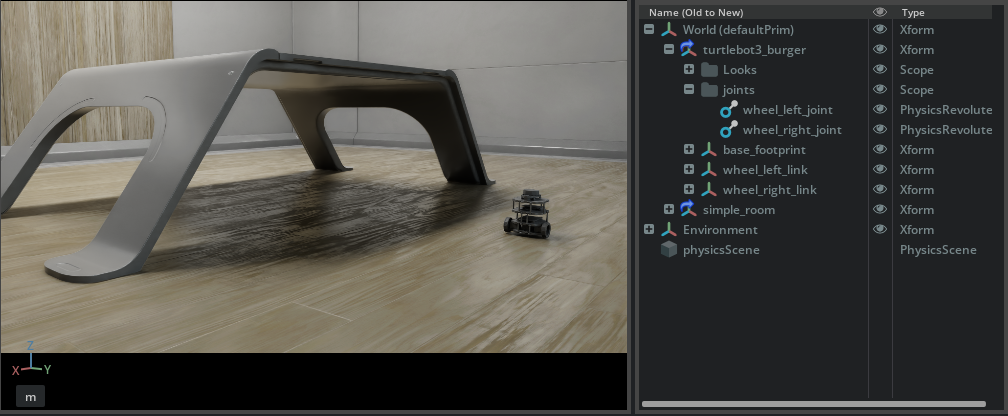
Once the asset is imported into Omniverse Kit, a copy of the .usd version of the asset will be automatically saved. You can specify the folder you wish to save the asset in USD Output if it’s different than the folder that the .urdf file is located in. A folder name matching the .urdf file will be created in the specified directory, and the .usd file will be inside the newly created folder.
When the Turtlebot is first imported, it will be on the table. Place it just above the floor of the room using the gizmo.
Press Play and you should see the Turtlebot fall onto the floor.
Tune the Robot#
Importing the URDF automatically imports material, physical, and joint properties whenever it is available and have matching categories in NVIDIA Isaac Sim. However, in cases there are no available or matching categories, or if the units are different between the two systems, what gets automatically filled in may not be accurate and changes the robot’s behavior. Here are the steps for tuning some of the common parameters.
Frictional Properties
If your robot’s wheels are slipping, try changing the friction coefficients of the wheels and potentially the ground as well following steps 3.4.2 in Add Simple Objects
Physical Properties
If no explicit mass or inertial properties are given, the physics engine will estimate them from the geometry mesh. To update the mass and inertial properties, find the prim that contains the rigid body for the given link (You can verify this by finding Physics > Rigid Body under its property tab). If it already has a “Mass” category under its Physics property tab, modify them accordingly. If there isn’t already a “Mass” category, you can add it by clicking on the +Add button on top of the Propery tab, and select Physics > Mass.
Joint Properties
If your robot is oscillating at the joint or moving too slow, take a look at the stiffness and damping parameters for the joints. High stiffness makes the joints snap faster and harder to the desire target, and higher damping smoothes but also slows down the joint’s movement to target. For pure position drives, set relatively high stiffness and low damping. For velocity drives, stiffness must be set to zero with a non-zero damping. We provide two tools to help with inspect the joints and tune the stiffness and damping parameters: Gain Tuner Extension and Physics Inspector. Please go to the perspective tutorials for details on how to use them.
Note
When URDF importing finishes, the robot that appears on Stage is usually loaded as a reference. This can be confirmed by an orange arrow on the robot prim on the stage tree  . If you have problem changing the parameters and saving them, you may need to edit the original USD file that the reference is pointing to instead. The path to the original USD file can be found under the property tab References > Asset Path.
. If you have problem changing the parameters and saving them, you may need to edit the original USD file that the reference is pointing to instead. The path to the original USD file can be found under the property tab References > Asset Path.
Summary#
This tutorial covered the following topics:
URDF import
Tuning the robot parameters
Next Steps#
Continue on to the next tutorial in our ROS Tutorials series, Driving TurtleBot via ROS Messages, to learn how to add OmniGraph nodes to move the robot, and ROS bridge nodes to connect to the ROS network.
Further Learning#
More details URDF Importer Extension.
More details on world building Assemble a Simple Robot
More details about Gain Tuner Extension and Physics Inspector