Examples#
Isaac Sim provides a library of examples and demos that serves as a showcase of Isaac Sim capabilities and a learning resource for developing your own projects. Some are Interactive Examples that can be opened while the simulator is open, some are Standalone Examples for running Isaac Sim from the command line using the Standalone workflow.
Interactive Examples#
Interactive examples can be found by going to the top Menu Bar and clicking Window > Examples > Robotics Examples. A browser should appear on the bottom left of the screen, in the same space as the Content browser. Click on the Robotics Examples tab to bring the browser into view.
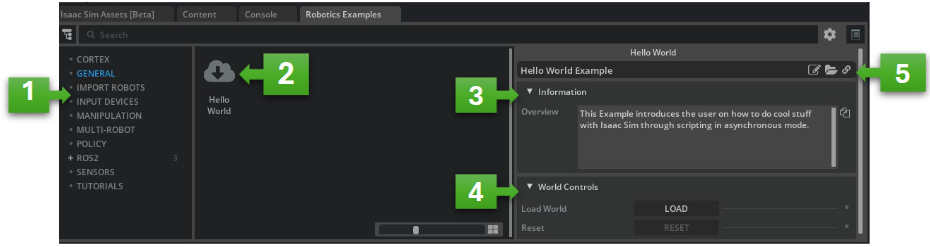
The examples are organized into categories shown on the left hand panel. Click through the categories and subcateogries to see the examples inside each. Click on the example thumbnail in the main browser window to load the interactive GUI on the right hand panel of the browser. Expand the Information tab to reveal the summary and instructions for the example.
Ref # |
Function |
Action |
|---|---|---|
1 |
Category Menu |
Click on the category to see the included examples
|
2 |
Example |
Click on the example to open the interactive GUI on the left hand panel, click again to refresh and reload the example
|
3 |
Information Window |
Expand to see the summary and instructions for the example
|
4 |
Controls |
Expand to see the buttons for running the example
|
5 |
Links |
Quick Access to source code, source folder, and documentation
|
Standalone Examples#
In addition to the interactive examples, Isaac Sim also provides standalone examples that can be run from the command line. These examples are located in the <isaac_sim_root_dir>/standalone_examples directory.
To run an example:
Navigate to your <isaac_sim_root_dir>.
Run the example script using
./python.shfor Linux orpython.batfor Windows.
For example, to run the hello_world example, navigate to the <isaac_sim_root_dir> and run the following command:
./python.sh standalone_examples/api/isaacsim.simulation_app/hello_world.py
python.bat standalone_examples\api\isaacsim.simulation_app\hello_world.py