Multiple Robot Scenarios#
Learning Objectives#
This tutorial describes how to create and manage multiple robot scenarios in NVIDIA Isaac Sim. It explains how to use parameterization and Python classes to scale your simulations with multiple instances of robots performing similar tasks. After this tutorial, you will have more experience building scalable multi-robot simulations in NVIDIA Isaac Sim.
15-20 Minute Tutorial
Getting Started#
Prerequisites
Review Adding Multiple Robots prior to beginning this tutorial.
Begin with the source code open from the previous tutorial, Adding Multiple Robots.
Note
Pressing STOP, then PLAY in this workflow might not reset the world properly. Use the RESET button instead.
Organizing Robot Scenarios with Classes#
When working with multiple robots performing similar tasks, it’s helpful to encapsulate the robot setup and control logic into reusable classes. This approach allows you to easily create multiple instances with different parameters (like position offsets).
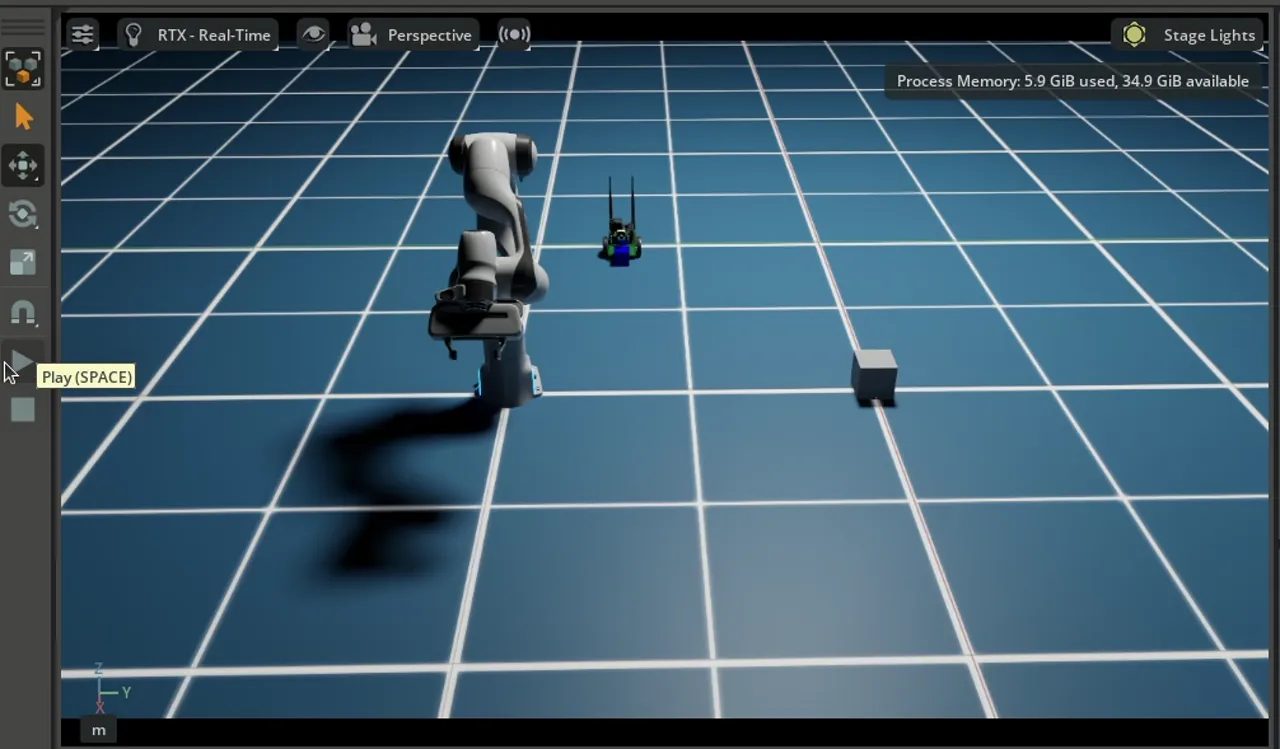
Create a RobotScenario class that manages a Jetbot pushing a cube to a Franka:
1import isaacsim.core.experimental.utils.stage as stage_utils
2import numpy as np
3from isaacsim.core.experimental.materials import PreviewSurfaceMaterial
4from isaacsim.core.experimental.objects import Cube
5from isaacsim.core.experimental.prims import Articulation, GeomPrim, RigidPrim, XformPrim
6from isaacsim.core.simulation_manager import SimulationManager
7from isaacsim.examples.base.base_sample_experimental import BaseSample
8from isaacsim.robot.manipulators.examples.franka import FrankaExperimental
9from isaacsim.storage.native import get_assets_root_path
10
11
12class RobotScenario:
13 """Encapsulates a Jetbot + Franka + Cube scenario with an offset."""
14
15 def __init__(self, name: str, offset: np.ndarray = np.array([0.0, 0.0, 0.0])):
16 self.name = name
17 self.offset = offset
18 self.state = 0
19 self.step_counter = 0
20 self.pick_phase = 0
21 self.jetbot = None
22 self.franka = None
23 self.cube = None
24 self.cube_goal = np.array([1.2, 0.0, 0.0]) + offset
25
26 def setup_scene(self):
27 """Create the robots and cube for this scenario."""
28 assets_root_path = get_assets_root_path()
29 base_path = f"/World/{self.name}"
30
31 # Add Jetbot
32 stage_utils.add_reference_to_stage(
33 usd_path=assets_root_path + "/Isaac/Robots/NVIDIA/Jetbot/jetbot.usd",
34 path=f"{base_path}/Jetbot",
35 )
36 jetbot_xform = XformPrim(f"{base_path}/Jetbot")
37 jetbot_xform.reset_xform_op_properties()
38 jetbot_xform.set_world_poses(positions=[self.offset.tolist()])
39
40 # Add cube in front of Jetbot
41 cube_pos = self.offset + np.array([0.15, 0.0, 0.025])
42 visual_material = PreviewSurfaceMaterial(f"{base_path}/Materials/red")
43 visual_material.set_input_values("diffuseColor", [1.0, 0.0, 0.0])
44 cube_shape = Cube(
45 paths=f"{base_path}/Cube",
46 positions=np.array([cube_pos]),
47 sizes=[1.0],
48 scales=np.array([[0.05, 0.05, 0.05]]),
49 reset_xform_op_properties=True,
50 )
51 GeomPrim(paths=cube_shape.paths, apply_collision_apis=True)
52 RigidPrim(paths=cube_shape.paths)
53 cube_shape.apply_visual_materials(visual_material)
54
55 # Add Franka
56 franka_pos = self.offset + np.array([0.8, -0.3, 0.0])
57 self.franka = FrankaExperimental(robot_path=f"{base_path}/Franka", create_robot=True)
58 franka_xform = XformPrim(f"{base_path}/Franka")
59 franka_xform.reset_xform_op_properties()
60 franka_xform.set_world_poses(positions=[franka_pos.tolist()])
61
62 def initialize(self):
63 """Initialize articulation handles after scene load."""
64 base_path = f"/World/{self.name}"
65 self.jetbot = Articulation(f"{base_path}/Jetbot")
66 self.cube = RigidPrim(f"{base_path}/Cube")
67
68 def reset(self):
69 """Reset the scenario state."""
70 self.state = 0
71 self.step_counter = 0
72 self.pick_phase = 0
73 self.franka.reset_to_default_pose()
74
75 def step(self):
76 """Execute one step of the scenario logic."""
77 if self.state == 0:
78 # Jetbot pushes cube
79 cube_pos = self.cube.get_world_poses()[0].numpy()[0]
80 if np.linalg.norm(cube_pos[:2] - self.cube_goal[:2]) > 0.05:
81 self.jetbot.set_dof_velocity_targets([[10.0, 10.0]])
82 else:
83 self.jetbot.set_dof_velocity_targets([[0.0, 0.0]])
84 self.state = 1
85 self.step_counter = 0
86
87 elif self.state == 1:
88 # Jetbot backs up
89 self.jetbot.set_dof_velocity_targets([[-8.0, -8.0]])
90 self.step_counter += 1
91 if self.step_counter > 100:
92 self.jetbot.set_dof_velocity_targets([[0.0, 0.0]])
93 self.state = 2
94 self.step_counter = 0
95 self.franka.open_gripper()
96
97 elif self.state == 2:
98 # Franka pick-and-place
99 self._franka_pick_place()
100
101 def _franka_pick_place(self):
102 """Execute Franka pick-and-place state machine."""
103 cube_pos = self.cube.get_world_poses()[0].numpy()[0]
104 down_orient = self.franka.get_downward_orientation()
105 self.step_counter += 1
106
107 if self.pick_phase == 0:
108 self.franka.set_end_effector_pose(np.array([[cube_pos[0], cube_pos[1], cube_pos[2] + 0.2]]), down_orient)
109 if self.step_counter > 120:
110 self.pick_phase = 1
111 self.step_counter = 0
112 elif self.pick_phase == 1:
113 self.franka.set_end_effector_pose(np.array([[cube_pos[0], cube_pos[1], cube_pos[2] + 0.1]]), down_orient)
114 if self.step_counter > 100:
115 self.franka.close_gripper()
116 self.pick_phase = 2
117 self.step_counter = 0
118 elif self.pick_phase == 2:
119 self.franka.close_gripper()
120 if self.step_counter > 50:
121 self.pick_phase = 3
122 self.step_counter = 0
123 elif self.pick_phase == 3:
124 self.franka.set_end_effector_pose(np.array([[cube_pos[0], cube_pos[1], cube_pos[2] + 0.25]]), down_orient)
125 if self.step_counter > 100:
126 self.pick_phase = 4
127 self.step_counter = 0
128 elif self.pick_phase == 4:
129 target = self.offset + np.array([0.3, 0.3, 0.15])
130 self.franka.set_end_effector_pose(np.array([target]), down_orient)
131 if self.step_counter > 150:
132 self.franka.open_gripper()
133 self.step_counter = 0
134 self.pick_phase = 5
135 elif self.pick_phase == 5:
136 # Lift the arm from target position (don't use cube_pos - cube was dropped)
137 target = self.offset + np.array([0.3, 0.3, 0.4]) # Lift above drop location
138 self.franka.set_end_effector_pose(np.array([target]), down_orient)
139 if self.step_counter > 150:
140 self.step_counter = 0
141 self.state = 5 # Done
142
143
144class HelloWorld(BaseSample):
145 def __init__(self) -> None:
146 super().__init__()
147 self._physics_callback_id = None
148 self._scenario = None
149
150 def setup_scene(self):
151 # Add ground plane
152 stage_utils.add_reference_to_stage(
153 usd_path=get_assets_root_path() + "/Isaac/Environments/Grid/default_environment.usd",
154 path="/World/ground",
155 )
156 # Create a single scenario
157 self._scenario = RobotScenario(name="scenario_0", offset=np.array([0.0, 0.0, 0.0]))
158 self._scenario.setup_scene()
159
160 async def setup_post_load(self):
161 self._scenario.initialize()
162
163 from isaacsim.core.simulation_manager.impl.isaac_events import IsaacEvents
164
165 self._physics_callback_id = SimulationManager.register_callback(
166 self.physics_step, IsaacEvents.POST_PHYSICS_STEP
167 )
168
169 def physics_step(self, dt, context):
170 self._scenario.step()
171
172 async def setup_post_reset(self):
173 self._scenario.reset()
174
175 def physics_cleanup(self):
176 if self._physics_callback_id is not None:
177 SimulationManager.deregister_callback(self._physics_callback_id)
178 self._physics_callback_id = None
Scaling to Multiple Scenarios#
1import isaacsim.core.experimental.utils.stage as stage_utils
2import numpy as np
3from isaacsim.core.experimental.materials import PreviewSurfaceMaterial
4from isaacsim.core.experimental.objects import Cube
5from isaacsim.core.experimental.prims import Articulation, GeomPrim, RigidPrim, XformPrim
6from isaacsim.core.simulation_manager import SimulationManager
7from isaacsim.examples.base.base_sample_experimental import BaseSample
8from isaacsim.robot.manipulators.examples.franka import FrankaExperimental
9from isaacsim.storage.native import get_assets_root_path
10
11# RobotScenario class definition (same as above)
12# ... (include the full RobotScenario class from the previous example)
13
14
15class HelloWorld(BaseSample):
16 def __init__(self) -> None:
17 super().__init__()
18 self._physics_callback_id = None
19 self._scenarios = []
20 self._num_scenarios = 2 # Number of parallel scenarios
21
22 def setup_scene(self):
23 # Add ground plane
24 stage_utils.add_reference_to_stage(
25 usd_path=get_assets_root_path() + "/Isaac/Environments/Grid/default_environment.usd",
26 path="/World/ground",
27 )
28
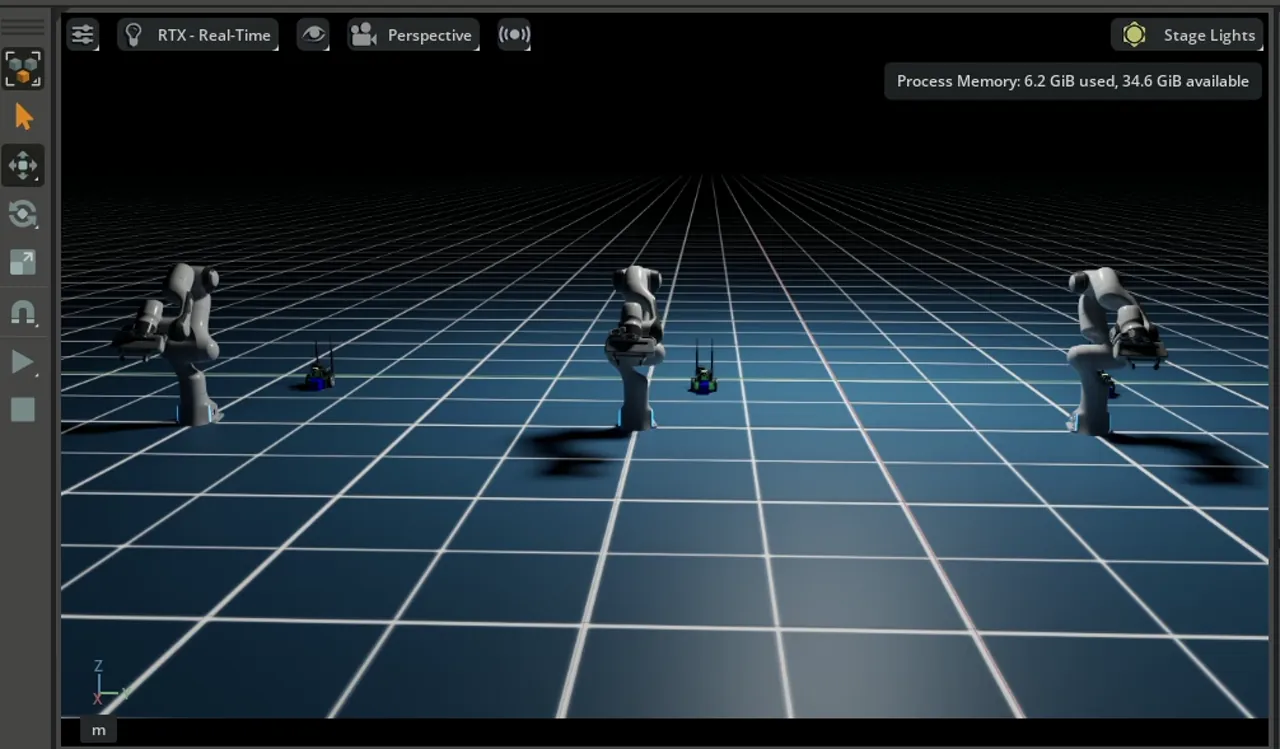
29 # Create multiple scenarios with Y-axis offsets
30 for i in range(self._num_scenarios):
31 offset = np.array([0.0, (i - 1) * 2.0, 0.0]) # Spread along Y-axis
32 scenario = RobotScenario(name=f"scenario_{i}", offset=offset)
33 scenario.setup_scene()
34 self._scenarios.append(scenario)
35
36 async def setup_post_load(self):
37 # Initialize all scenarios
38 for scenario in self._scenarios:
39 scenario.initialize()
40
41 from isaacsim.core.simulation_manager.impl.isaac_events import IsaacEvents
42
43 self._physics_callback_id = SimulationManager.register_callback(
44 self.physics_step, IsaacEvents.POST_PHYSICS_STEP
45 )
46
47 def physics_step(self, dt, context):
48 # Step all scenarios
49 for scenario in self._scenarios:
50 scenario.step()
51
52 async def setup_post_reset(self):
53 # Reset all scenarios
54 for scenario in self._scenarios:
55 scenario.reset()
56
57 def physics_cleanup(self):
58 if self._physics_callback_id is not None:
59 SimulationManager.deregister_callback(self._physics_callback_id)
60 self._physics_callback_id = None
61 self._scenarios = []
Adding Randomization#
To make simulations more interesting, you can add randomization to the scenario parameters.
Modify the RobotScenario class to accept randomization options:
1class RobotScenario:
2 """Encapsulates a Jetbot + Franka + Cube scenario with randomization."""
3
4 def __init__(self, name: str, offset: np.ndarray = np.array([0.0, 0.0, 0.0]), randomize: bool = False):
5 self.name = name
6 self.offset = offset
7 self.randomize = randomize
8 self.state = 0
9 self.step_counter = 0
10 self.pick_phase = 0
11
12 # Randomize cube goal position if enabled
13 if randomize:
14 random_x = np.random.uniform(1.1, 1.4)
15 self.cube_goal = np.array([random_x, 0.0, 0.0]) + offset
16 else:
17 self.cube_goal = np.array([1.2, 0.0, 0.0]) + offset
18
19 # ... rest of the class remains the same
Then create scenarios with randomization enabled:
1# Create multiple scenarios with randomization
2for i in range(self._num_scenarios):
3 offset = np.array([0.0, (i - 1) * 2.0, 0.0])
4 scenario = RobotScenario(name=f"scenario_{i}", offset=offset, randomize=True) # Enable randomization
5 scenario.setup_scene()
6 self._scenarios.append(scenario)
Best Practices for Scaling#
When creating large-scale multi-robot simulations:
Use unique paths: Each scenario should use unique USD prim paths to avoid conflicts. The
RobotScenarioclass uses the scenario name to create unique paths like/World/scenario_0/Jetbot.Manage state independently: Each scenario instance maintains its own state variables, allowing scenarios to progress independently.
Clean up properly: The
physics_cleanupmethod ensures callbacks are deregistered and scenario lists are cleared when the simulation is stopped.Consider performance: With many scenarios, consider reducing physics step frequency or using GPU-accelerated simulation for better performance.
Summary#
This tutorial covered the following topics:
Organizing robot scenarios into reusable Python classes
Using the
offsetparameter to position multiple scenarios in the worldScaling to multiple parallel scenarios with a simple loop
Adding randomization to scenario parameters
Best practices for managing multiple robot instances