Tutorial: Import MJCF#
Learning Objectives#
This tutorial shows how to import a mjcf model and convert it to a USD in NVIDIA Isaac Sim. After this tutorial, you can use mjcf files in your pipeline while using NVIDIA Isaac Sim.
5-10 Minute Tutorial
Getting Started#
Prerequisites
Review the Getting Started Tutorials prior to beginning this tutorial.
Using the MJCF Importer#
Let’s begin by importing an Ant MJCF from the Built in MJCF files that come with the extension.
Load the MJCF Importer extension, which should be automatically loaded when NVIDIA Isaac Sim opens and can be accessed from the File > Import menu. If not MJCF files are not listed in the import formats, go to Window > Extensions and enable
isaacsim.asset.importer.mjcf.In the file selection dialog box, navigate to the desired folder, and select the desired MJCF file. For this example, we will use the Humanoid
nv_humanoid.xmlfile that comes with this extension, included in the extension assets. The easiest way to find it is:Click on the folder icon beside AUTOLOAD to find the isaacsim.asset.importer.mjcf extension
Navigate to
/data/mjcfand findnv_humanoid.xml.
Change the import options according to the your needs. Check Import Options for more information on the import options.
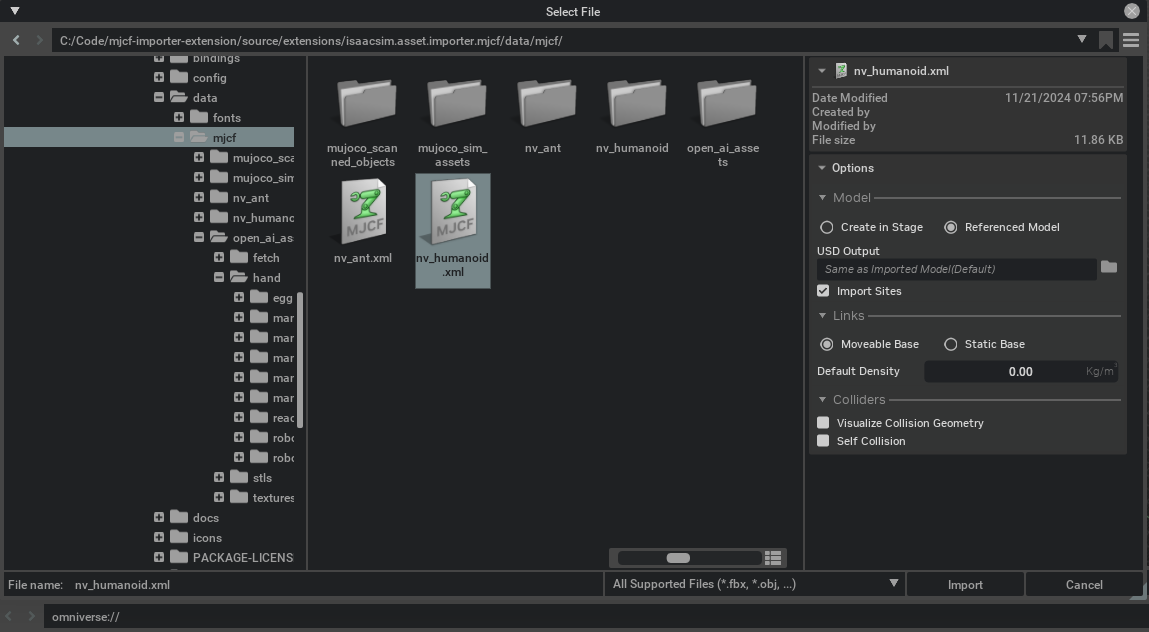
Click the Import button to add the robot to the stage.
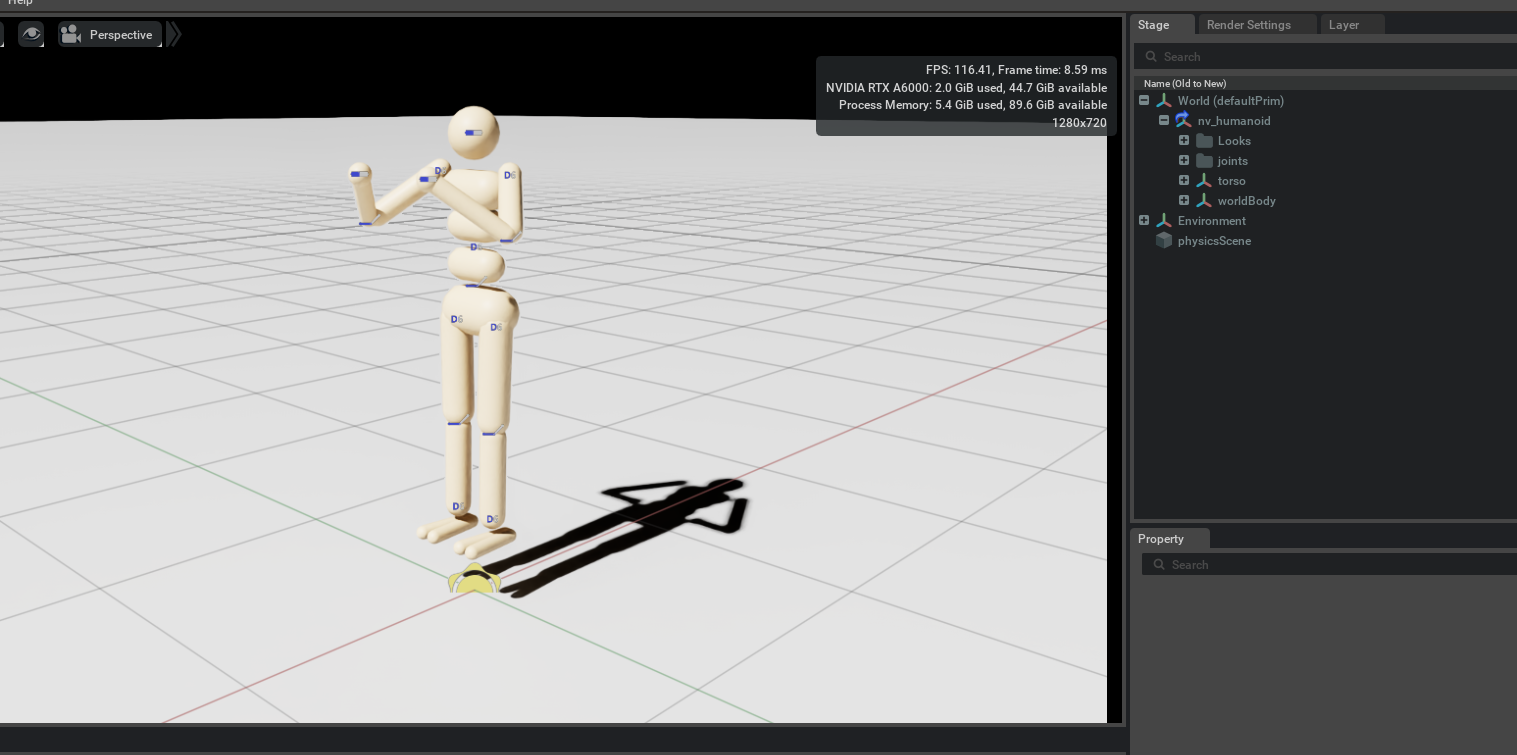
The robot is now imported into the stage. You can now use it in your simulation. You can perform additional changes to the asset once it’s imported, such as adding sensors, changing materials, and updating the joint drives and configuration to achieve a more stable simulation. Robots are mapped as Articulations in the simulation, and for a complete guide in tuning articulations, refer to Articulation Stability Guide
Importing MJCF using Python#
Let’s do the exact same things as we did before but with Python scripting instead.
Let’s begin by opening the Script Editor. Go to the top Menu Bar and click Window -> Script Editor
The window for the Script Editor should now be visible in the workspace.
Copy the following code into the Script Editor window.
1import omni.kit.commands 2from pxr import UsdLux, Sdf, Gf, UsdPhysics, PhysicsSchemaTools 3 4# create new stage 5omni.usd.get_context().new_stage() 6 7# setting up import configuration: 8status, import_config = omni.kit.commands.execute("MJCFCreateImportConfig") 9import_config.set_fix_base(False) 10import_config.set_make_default_prim(False) 11 12# Get path to extension data: 13ext_manager = omni.kit.app.get_app().get_extension_manager() 14ext_id = ext_manager.get_enabled_extension_id("isaacsim.asset.importer.mjcf") 15extension_path = ext_manager.get_extension_path(ext_id) 16 17# import MJCF 18omni.kit.commands.execute( 19 "MJCFCreateAsset", 20 mjcf_path=extension_path + "/data/mjcf/nv_ant.xml", 21 import_config=import_config, 22 prim_path="/ant" 23) 24 25# get stage handle 26stage = omni.usd.get_context().get_stage() 27 28# enable physics 29scene = UsdPhysics.Scene.Define(stage, Sdf.Path("/physicsScene")) 30 31# set gravity 32scene.CreateGravityDirectionAttr().Set(Gf.Vec3f(0.0, 0.0, -1.0)) 33scene.CreateGravityMagnitudeAttr().Set(981.0) 34 35# add lighting 36distantLight = UsdLux.DistantLight.Define(stage, Sdf.Path("/DistantLight")) 37distantLight.CreateIntensityAttr(500)
Click the Run (Ctrl + Enter) button to import the Ant robot.
Summary#
This tutorial covered the following topics:
Importing MJCF file using GUI
Importing MJCF file using Python
Create a Ground Plane
Further Learning#
Checkout MJCF Importer Extension to learn more about the different configuration settings to import a mjcf in NVIDIA Isaac Sim.