ROS 2 Python Custom OmniGraph Node#
Learning Objectives#
This is an optional, advanced tutorial where you will learn how to
Use ROS 2 rclpy Python interface with Isaac Sim
Create a basic custom OmniGraph Python node (using the Isaac Sim VS Code Edition) that can subscribe to a topic (with message type
std_msgs/msg/Int32) and output the Fibonacci computation of the published number.
Getting Started#
Prerequisite
Completed ROS 2 Installation (Default): installed ROS2, enabled the ROS2 extension, built the provided Isaac Sim ROS 2 workspace, and set up the necessary environment variables.
Completed the tutorial for writing custom Python nodes: Custom Python Nodes
Creating the ROS 2 Custom OmniGraph Python Node Template#
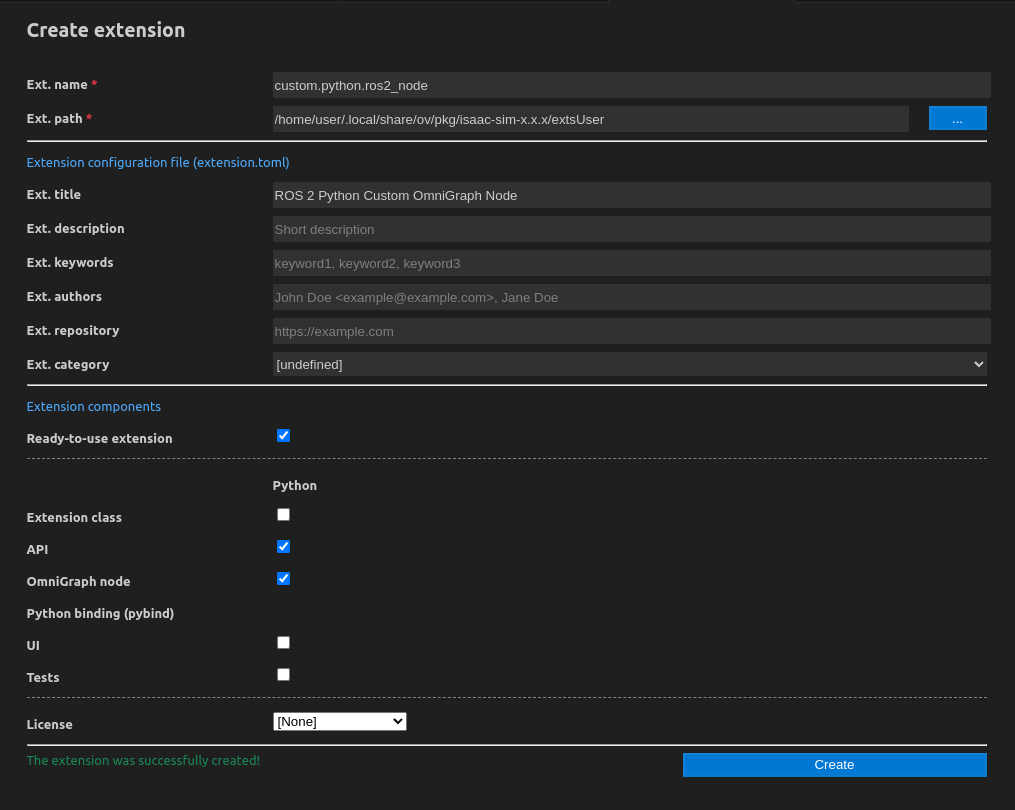
Go to Template > Extension in the Isaac Sim VS Code Edition (VS Code extension) to open a wizard to create a new Isaac Sim extension.
Take action on the following fields:
Ext. name: Set to
custom.python.ros2_nodeExt. path: Define the target path where the extension will be created.
Ext. title: Set to
ROS 2 Python Custom OmniGraph NodeReady-to-use extension: Check it to create a ready-to-use extension in Python.
OmniGraph node: Check it to generate OmniGraph-specific files/folders when creating the extension.
Edit the extension configuration file (
custom.python.ros2_node/config/extension.toml) to add the Isaac Sim’s ROS 2 Bridge extension as a dependency (under[dependencies])[dependencies] "isaacsim.ros2.bridge" = {}
Edit the OmniGraph definition file (
OgnCustomPythonRos2NodePy.ognlocated in thecustom.python.ros2_node/custom/python/ros2_node/ogn/python/nodesfolder) with the following specification.This specification defines an OmniGraph node with two inputs (the input execution trigger, and the topic name to subscribe to (a string)) and two outputs (the output execution trigger, and the computed Fibonacci number (an integer)).
Hint
Visit the OGN Reference Guide for a detailed guide to the syntax of
.ognfiles. Visit OmniGraph’s Attribute Data Types for more details about the supported attribute data types for inputs and outputs.{ "CustomPythonRos2NodePy": { "version": 1, "language": "python", "icon": "icons/icon.svg", "uiName": "Custom Python ROS 2 Node", "description": [ "This node subscribes to a ROS 2 topic (with message type 'std_msgs/msg/Int32') and computes and outputs the Fibonacci number" ], "categoryDefinitions": "config/CategoryDefinition.json", "categories": ["extension:Category"], "inputs": { "execIn": { "type": "execution", "description": "Input execution trigger" }, "topic": { "type": "string", "uiName": "Subscription topic", "description": "Topic to subscribe to", "default": "/number" } }, "outputs": { "execOut": { "type": "execution", "description": "Output execution trigger" }, "fibonacci": { "type": "uint64", "uiName": "Fibonacci", "description": "Computed Fibonacci number" } } } }
Edit the OmniGraph Python source code file (
OgnCustomPythonRos2NodePy.pylocated in thecustom.python.ros2_node/custom/python/ros2_node/ogn/python/nodesfolder) with the following content.The code is self-commented enough. Basically, the
OgnCustomPythonRos2NodePyInternalStateclass handles the communication with ROS. It creates the ROS 2 node, the subscription and handles the received messages. On the other hand, theOgnCustomPythonRos2NodePyclass implements the custom OmniGraph node. It computes and sets the outputs according to the input values and the internal state.import omni.graph.core import rclpy import std_msgs.msg from custom.python.ros2_node.ogn.OgnCustomPythonRos2NodePyDatabase import OgnCustomPythonRos2NodePyDatabase from isaacsim.core.nodes import BaseResetNode class OgnCustomPythonRos2NodePyInternalState(BaseResetNode): """Convenience class for maintaining per-node state information. It inherits from ``BaseResetNode`` to do custom reset operation when the timeline is stopped.""" def __init__(self): """Instantiate the per-node state information""" self._data = None self._ros2_node = None self._subscription = None # call parent class to set up timeline event for custom reset super().__init__(initialize=False) @property def data(self): """Get received data, and clean it after reading""" tmp = self._data self._data = None return tmp def _callback(self, msg): """Function that is called when a message is received by the subscription.""" self._data = msg.data def initialize(self, node_name, topic_name): """Intitialize ROS 2 node and subscription.""" try: rclpy.init() except: pass # create ROS 2 node if not self._ros2_node: self._ros2_node = rclpy.create_node(node_name=node_name) # create ROS 2 subscription if not self._subscription: self._subscription = self._ros2_node.create_subscription( msg_type=std_msgs.msg.Int32, topic=topic_name, callback=self._callback, qos_profile=10 ) self.initialized = True def spin_once(self, timeout_sec=0.01): """Do ROS 2 work to take an incoming message from the topic, if any.""" rclpy.spin_once(self._ros2_node, timeout_sec=timeout_sec) def custom_reset(self): """On timeline stop, destroy ROS 2 subscription and node.""" if self._ros2_node: self._ros2_node.destroy_subscription(self._subscription) self._ros2_node.destroy_node() self._data = None self._ros2_node = None self._subscription = None self.initialized = False rclpy.try_shutdown() class OgnCustomPythonRos2NodePy: """The OmniGraph node class""" @staticmethod def fibonacci(n): """Compute the Fibonacci sequence value for the given number iteratively""" if n <= 0: return 0 elif n == 1: return 1 a, b = 0, 1 for _ in range(2, n + 1): a, b = b, a + b return b @staticmethod def internal_state(): """Get per-node state information.""" return OgnCustomPythonRos2NodePyInternalState() @staticmethod def compute(db) -> bool: """Compute the output based on inputs and internal state.""" state = db.per_instance_state try: # check if state (ROS 2 node and subscriber is initialized) if not state.initialized: state.initialize(node_name="custom_python_ros2_node", topic_name=db.inputs.topic) # spin state to take incoming messages state.spin_once() # cache incomming data number = state.data if number is not None: # compute the Fibonacci sequence value for the given number value = OgnCustomPythonRos2NodePy.fibonacci(number) # check for uint64 overflow if value > 2**64: db.log_warn(f"Fibonacci number {number} exceeds uint64's storage capacity") return False # output value and trigger output execution db.outputs.fibonacci = value db.outputs.execOut = omni.graph.core.ExecutionAttributeState.ENABLED except Exception as e: db.log_error(f"Computation error: {e}") return False return True @staticmethod def release(node): """Release per-node state information.""" try: state = OgnCustomPythonRos2NodePyDatabase.per_instance_internal_state(node) except Exception as e: return # reset state state.reset() state.initialized = False
Running the Custom OmniGraph Node#
Warning
The custom extension must first be activated for the OmniGraph node to be available.
Open the extension manager using the Window > Extensions menu and search for the custom.python.ros2_node extension to enable it.
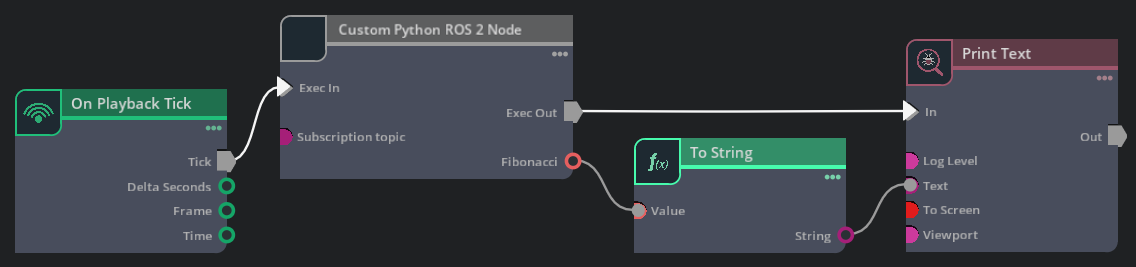
In a new stage, go to Window > Graph Editors > Action Graph to create an Action Graph and add, connect and configure the following OmniGraph nodes into the Action Graph:
On Playback Tick node to execute other graph nodes every simulation frame.
Custom Python ROS 2 Node custom node.
To String node to convert the output of our custom node to a string.
Print Text node to display the output of our custom node (as string) to the viewport or terminal. Edit this node’s properties, in the Property panel, and check the To Screen attribute to display the text in the viewport.
Play the simulation
In a new ROS 2-sourced terminal, run the next command to publish a number to the
/numbertopic.ros2 topic pub -1 /number std_msgs/msg/Int32 "{data: 10}"
After messages are being received from the topic, the Fibonacci number will appear in the top-left corner of the viewport. If no new values are received, the display will fade over time.
Note
To view the values in the Isaac Sim console, you can edit the Print Text node properties and uncheck the To Screen attribute and set the Log Level attribute to Warning.
Publish a different number using the previous ROS 2 topic command and notice the change in Isaac Sim.
Summary#
This tutorial covered the following topics:
Creating a custom OmniGraph Python node in an extension.
Using rclpy interface to create a ROS 2 node within a custom OmniGraph node to subscribe to a topic, perform the Fibonacci computation and trigger downstream nodes when the computed OmniGraph output is ready.
Next Steps#
Continue on to the next tutorial in our ROS2 Tutorials series, ROS 2 Custom C++ OmniGraph Node.