RTX Sensor Non-Visual Materials#
The omni.sensors.nv.materials extension, documented here, provides support for rendering materials which are visible in non-visual spectra for RTX sensors. These materials
are referred to as “non-visual materials”.
As described in the extension documentation, non-visual materials are rendered via USD attributes, and can be specified in the USD file. Isaac Sim includes APIs in the isaacsim.sensors.rtx extension to simplify setting these attributes on Material prims. The renderer
will compute a material ID for each non-visual material, based on the combination of provided attributes. This material ID is provided by the GenericModelOutput AOV, and is exposed by multiple Annotators. See RTX Sensor Annotators for more details.
Specifying Non-Visual Material Attributes#
Valid non-visual material attribute names and values are specified in Omniverse Kit documentation.
User Interface#
Attributes may be added to materials from the UI by right-clicking the material in the Stage window, then selecting Add > Attribute. This will open a new window like the one below, enabling you to specify custom non-visual attributes.
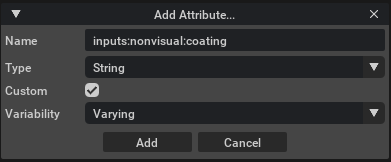
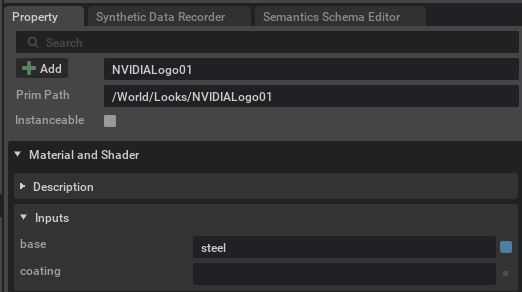
After adding the new attribute, it will appear in the material’s properties, at which point it can be populated:
Python#
isaacsim.sensors.rtx includes several Python APIs to simplify setting non-visual material attributes on Material prims. The following standalone example
demonstrates how to use these APIs. Examine the source code to learn more.
./python.sh standalone_examples/api/isaacsim.sensors.rtx/specify_non_visual_materials.py
Upon running this example, you should see the following:
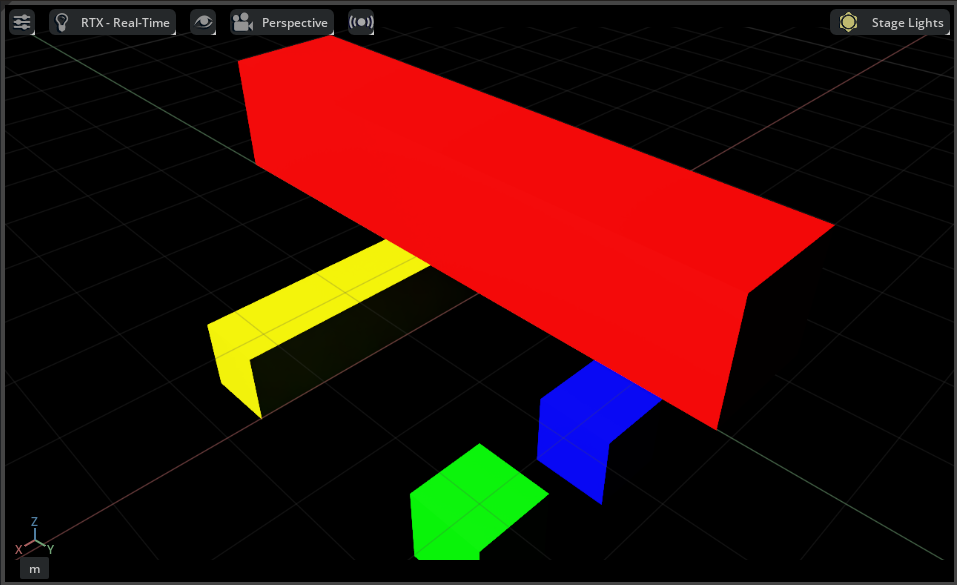
Observe each cube is colored differently in the visual spectrum. Select the Non-Visual Material ID Debug View in the viewport by selecting RTX - Real-Time > Debug View > Non-Visual Material ID. The following image
shows the menu selection:
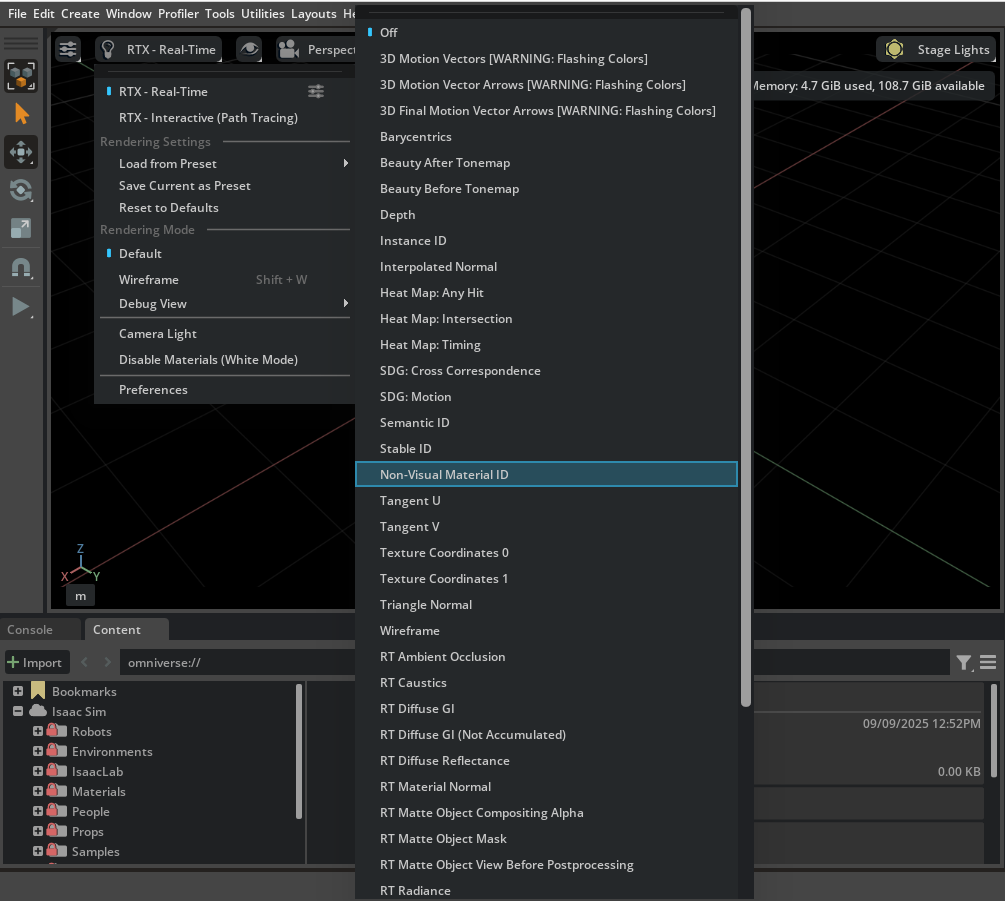
After selecting the Debug View, you should see the following:
The Non-Visual Material ID Debug View shows the material ID for each non-visual material as a color, which can be used to identify the material in the scene.
Observe each cube’s color changes compared to the default view to reflect the material ID, which is computed from the combination of non-visual material attributes applied to the visual material
applied to the cube.
Mapping Visual Materials to RTX Sensor Non-Visual Materials (Deprecated)#
Warning
Mapping Visual Materials to RTX Sensor non-visual materials via a CSV specification is deprecated as of Isaac Sim 5.1. By default, RTX Sensor non-visual materials will now be specified and rendered via USD attributes (see above).
There are 21 sensor materials that are rendered in the visual spectrum, and more can not be added at this time. Their properties are stored in JSON files by the same name, located in
the ./data/material_files/ folder.
Index |
Sensor Material Type |
|---|---|
0 |
Default |
1 |
AsphaltStandard |
2 |
AsphaltWeathered |
3 |
VegetationGrass |
4 |
WaterStandard |
5 |
GlassStandard |
6 |
FiberGlass |
7 |
MetalAlloy |
8 |
MetalAluminum |
9 |
MetalAluminumOxidized |
10 |
PlasticStandard |
11 |
RetroMarkings |
12 |
RetroSign |
13 |
RubberStandard |
14 |
SoilClay |
15 |
ConcreteRough |
16 |
ConcreteSmooth |
17 |
OakTreeBark |
18 |
FabricStandard |
19 |
PlexiGlassStandard |
20 |
MetalSilver |
31 |
INVALID |
Using Sensor Material Mapping#
In the legacy system, Isaac Sim must know how to map material IDs to the sensor material type
in the table above. This is done by setting the following carb setting on the command line:
--/rtx/materialDb/rtSensorNameToIdMap="DefaultMaterial:0;AsphaltStandardMaterial:1;AsphaltWeatheredMaterial:2;VegetationGrassMaterial:3;WaterStandardMaterial:4;GlassStandardMaterial:5;FiberGlassMaterial:6;MetalAlloyMaterial:7;MetalAluminumMaterial:8;MetalAluminumOxidizedMaterial:9;PlasticStandardMaterial:10;RetroMarkingsMaterial:11;RetroSignMaterial:12;RubberStandardMaterial:13;SoilClayMaterial:14;ConcreteRoughMaterial:15;ConcreteSmoothMaterial:16;OakTreeBarkMaterial:17;FabricStandardMaterial:18;PlexiGlassStandardMaterial:19;MetalSilverMaterial:20"
Having set rtx.materialDb.rtSensorNameToIdMap, edit kit/rendering-data/runtime/RtxSensorMaterialMap.csv to map exact material name tokens to sensor material types.
The RtxSensorMaterialMap.csv file contains a material prim partial names to sensor material type pairs. The ones that come with Isaac Sim by default can be deleted as they may clash with names you wish to set.
There is only one CSV file. It controls the material mapping for all of the content. It is read at Isaac Sim startup and any changes made during runtime will not appear until Isaac Sim is restarted.
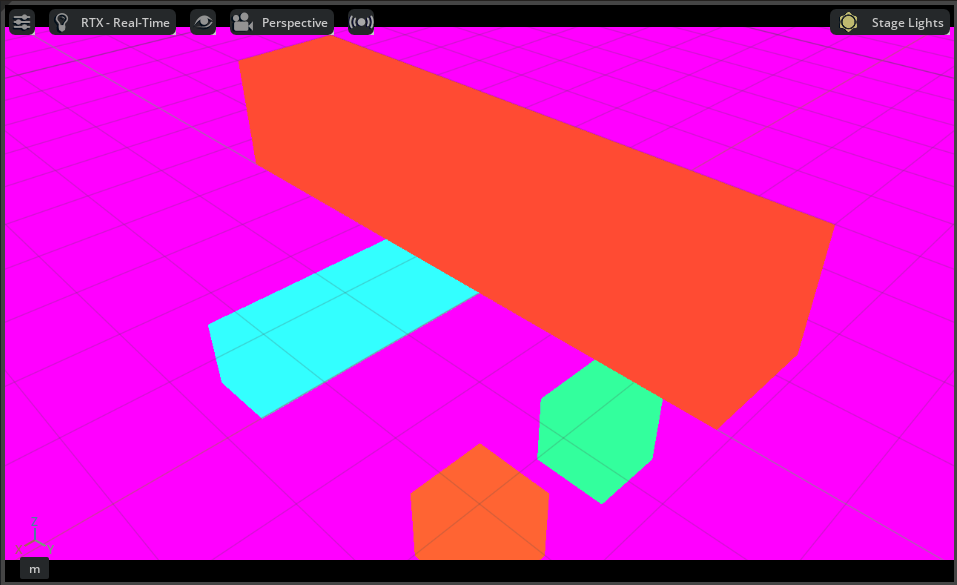
As an example, consider this scene:
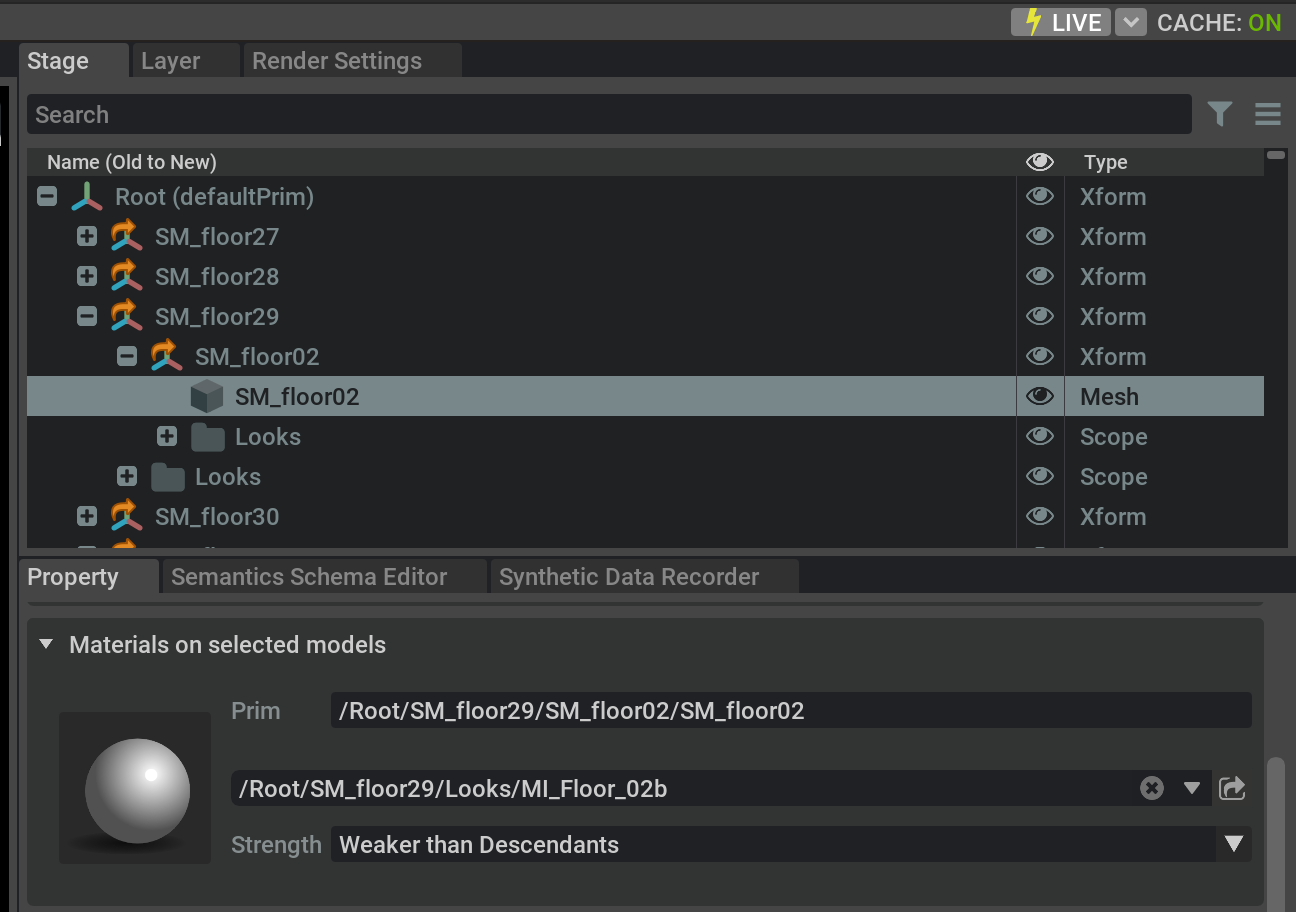
The /Root/SM_floor29/SM_floor02/SM_floor02 prim has a material prim assigned to it whose path is /Root/SM_floor29/Looks/MI_Floor_02b. If you want to add
an entry to the CSV file so that the SM_floor02 prim looks like rough concrete to the RTX sensors, you would add the entry:
mi_floor_02b,ConcreteRoughMaterial
Note that in the CSV mapping file, the first token after the first appearance of /Looks/ in the material prim name attached to the mesh is used, and it must
always be lowercase in the CSV file, no matter what the case is on the stage. Also note how the word Material is concatenated onto the sensor material type from
the table above.
Debugging#
The carb parameter:
[settings]
rtx.materialDb.rtSensorMaterialLogs=true
can help. If set to true, it will output a list of all the materials in the scene that are NOT mapped to a sensor material. This list outputs to the terminal and the log at Isaac Sim startup.