Robot Assets#
NVIDIA Isaac Sim supports a wide range of robots with differential bases, form factors, and functions.
These robots can be categorized as wheeled robots, holonomic robots, quadruped robots, robotic manipulator and aerial robots (drones). They can be found in the Content Browser in the Isaac Sim/Robots folder.
USD Path: iRobot/Create3/create_3.usd#
Properties
Number of Joints |
4 |
Number of Links |
5 |
Number of DOFs |
4 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
USD Path: Turtlebot/Turtlebot3/turtlebot3_burger.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
USD Path: NVIDIA/Robomaker/aws_robomaker_jetbot.usd#
Properties
Number of Joints |
5 |
Number of Links |
6 |
Number of DOFs |
2 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: NVIDIA/NovaCarter/nova_carter.usd#
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
7 |
Sensor/Accessory |
Count |
|---|---|
Camera |
12 |
IMU |
5 |
OmniSensor Lidar |
3 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI

USD Path: NVIDIA/Leatherback/leatherback.usd#
Properties
Number of Joints |
26 |
Number of Links |
27 |
Number of DOFs |
26 |
Sensors |
Count |
|---|---|
Camera |
4 |
Physics APIs:
PhysX ArticulationAPI
PhysX CollisionAPI
USD Path: NVIDIA/Jetbot/jetbot.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Sensors |
Count |
|---|---|
Camera |
2 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI

USD Path: NVIDIA/Carter/carter_v1.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
4 |
Sensors |
Count |
|---|---|
Camera |
5 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI

USD Path: NVIDIA/Carter/carter_v1_physx_lidar.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
4 |
Sensors |
Count |
|---|---|
Camera |
4 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI

USD Path: IsaacSim/ForkliftC/forklift_c.usd#
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
7 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX CollisionAPI

USD Path: IsaacSim/ForkliftB/forklift_b.usd#
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
7 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX CollisionAPI

USD Path: IsaacSim/ForkliftB/forklift_b_sensor.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Sensor/Accessory |
Count |
|---|---|
Camera |
6 |
IMU |
3 |
OmniSensor Lidar |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX CollisionAPI

USD Path: Idealworks/iwhub/iw_hub.usd#
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
7 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI

USD Path: Idealworks/iwhub/iw_hub_sensors.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Sensors |
Count |
|---|---|
Camera |
2 |
Physics APIs:
PhysX RigidBodyAPI
PhysX CollisionAPI
PhysX JointAPI
PhysX ArticulationAPI
PhysX SceneAPI

USD Path: Idealworks/iwhub/iw_hub_static.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |

USD Path: Fraunhofer/Evobot/evobot.usd#
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX ArticulationAPI
PhysX SceneAPI

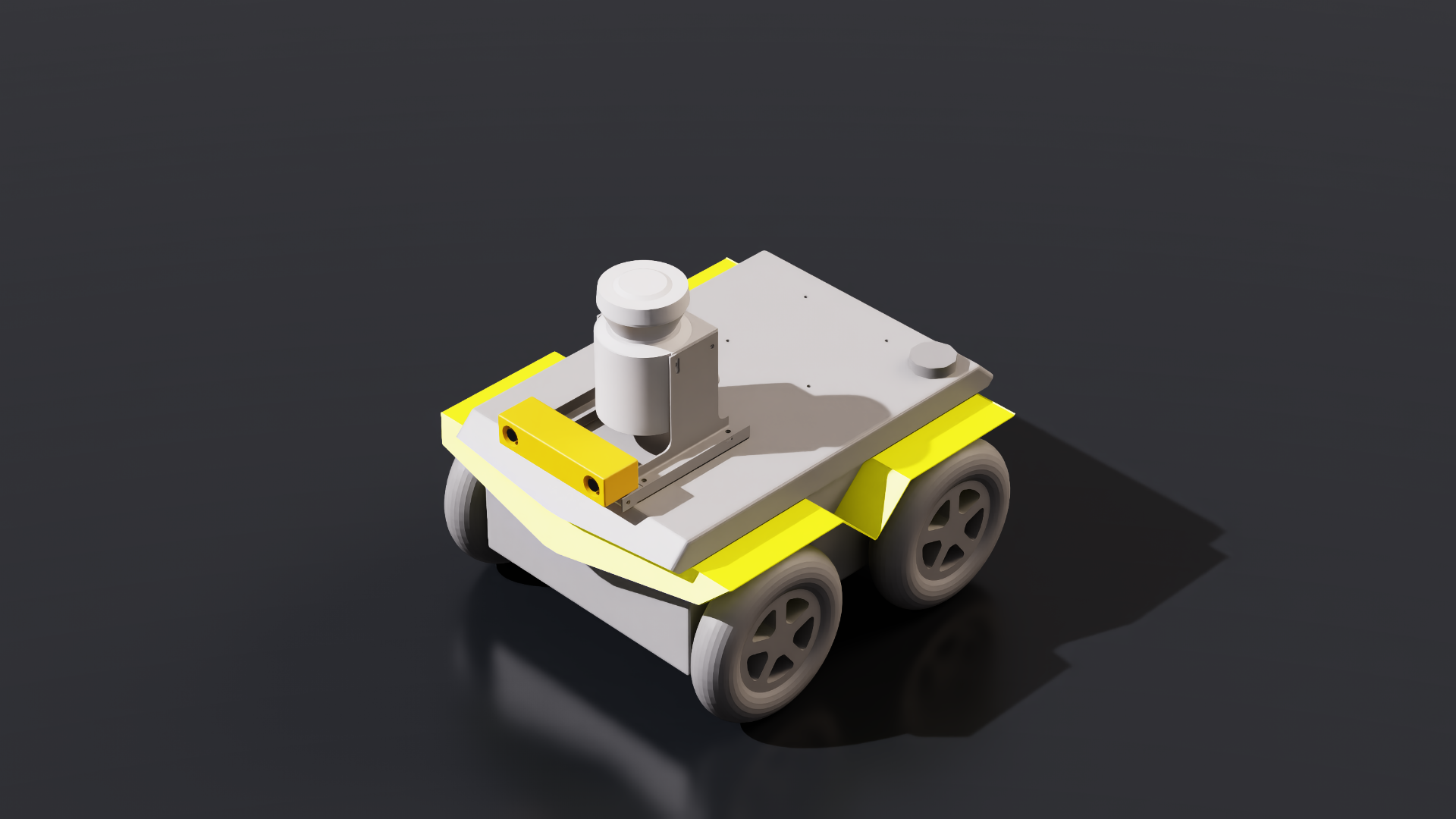
USD Path: Clearpath/Jackal/jackal.usd#
Properties
Number of Joints |
4 |
Number of Links |
5 |
Number of DOFs |
4 |
Sensor/Accessory |
Count |
|---|---|
Camera |
2 |
IMU |
1 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
USD Path: Clearpath/Jackal/jackal_basic.usd#
Properties
Number of Joints |
4 |
Number of Links |
5 |
Number of DOFs |
4 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
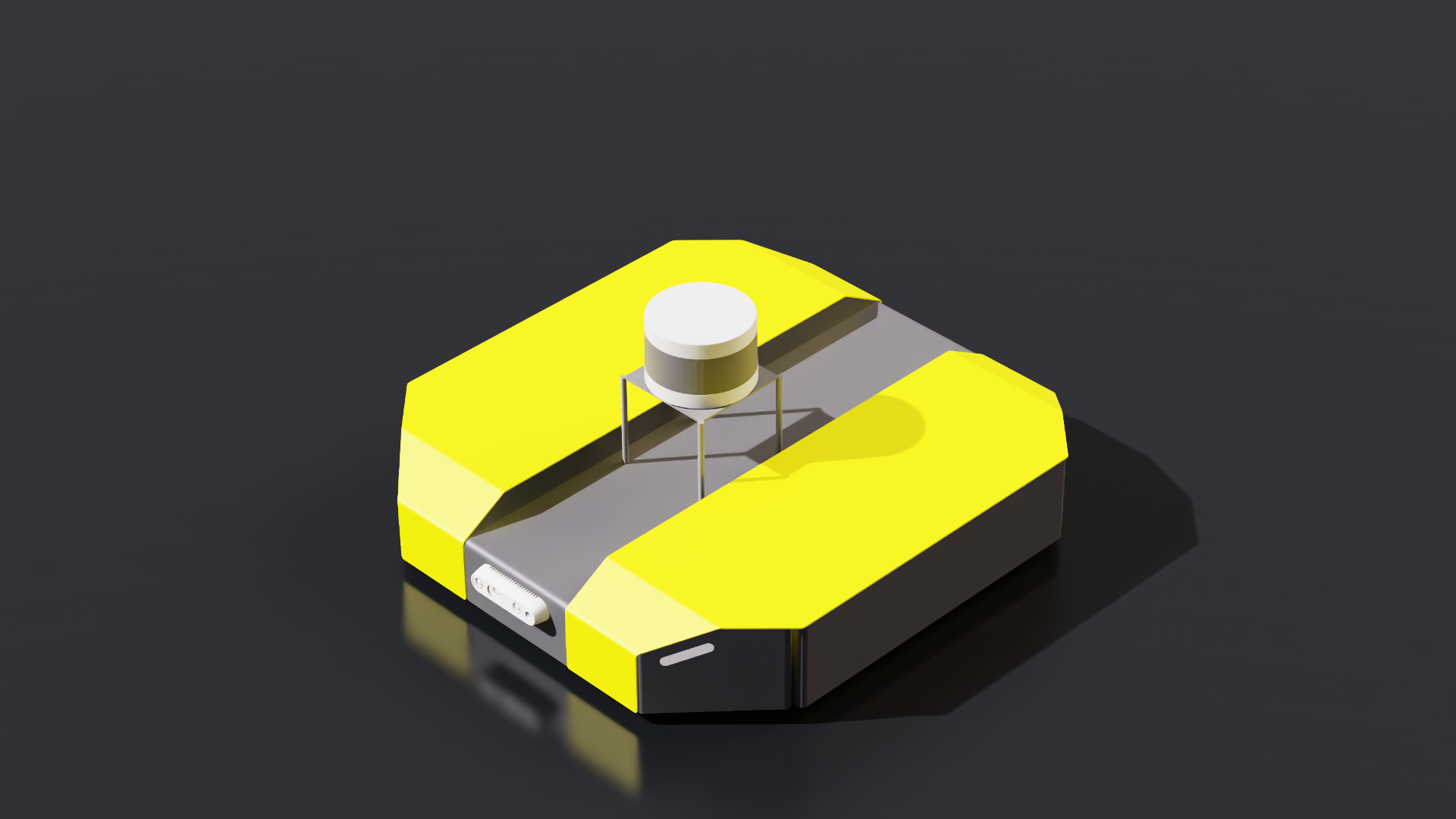
USD Path: Clearpath/Dingo/dingo.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Sensors |
Count |
|---|---|
Camera |
2 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
USD Path: Clearpath/Dingo/dingo_basic.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: AgilexRobotics/limo/limo.usd#
Properties
Number of Joints |
4 |
Number of Links |
5 |
Number of DOFs |
4 |
Sensors |
Count |
|---|---|
Camera |
1 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
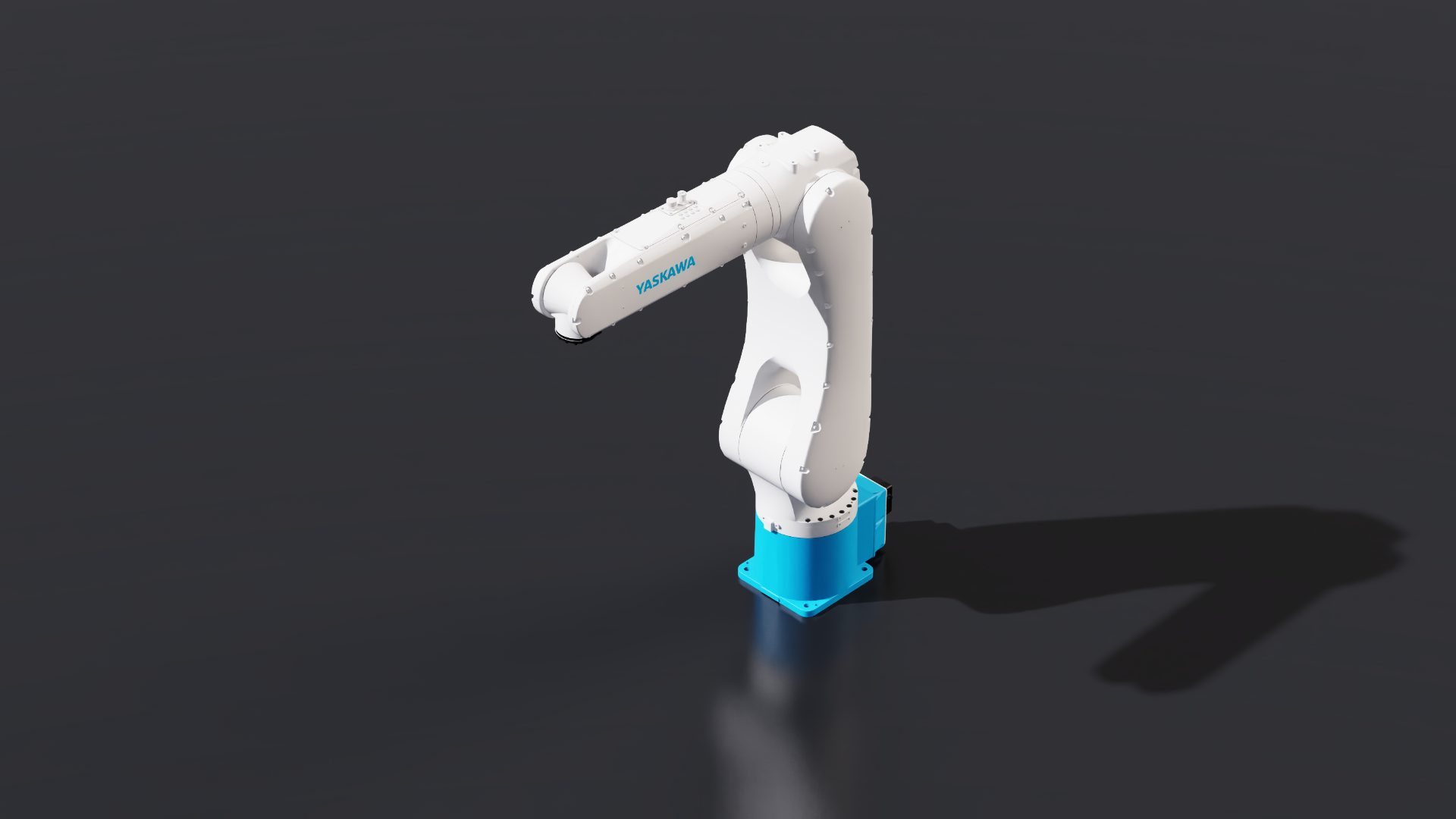
USD Path: Yaskawa/Motoman Next/NEX10/NEX10.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
USD Path: Yahboom/Dofbot/dofbot.usd#
Properties
Number of Joints |
11 |
Number of Links |
12 |
Number of DOFs |
11 |
Sensors |
Count |
|---|---|
Camera |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI
USD Path: WonikRobotics/AllegroHand/allegro.usd#
Properties
Number of Joints |
20 |
Number of Links |
21 |
Number of DOFs |
16 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
USD Path: WonikRobotics/AllegroHand/allegro_hand.usd#
Properties
Number of Joints |
20 |
Number of Links |
21 |
Number of DOFs |
16 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
USD Path: WonikRobotics/AllegroHand/allegro_hand_instanceable.usd#
Properties
Number of Joints |
20 |
Number of Links |
21 |
Number of DOFs |
16 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
This robot is in Isaac Lab

USD Path: UniversalRobots/ur5e/ur5e.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
USD Path: UniversalRobots/ur5/ur5.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: UniversalRobots/ur3e/ur3e.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: UniversalRobots/ur30/ur30.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX RigidBodyAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: UniversalRobots/ur3/ur3.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
USD Path: UniversalRobots/ur20/ur20.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: UniversalRobots/ur16e/ur16e.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: UniversalRobots/ur10e/ur10e.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Accessories:
Robotiq_2f_140
Robotiq_2f_85
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
USD Path: UniversalRobots/ur10/ur10.usd#
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Accessories:
Long_Suction
Short_Suction
Physics APIs:
PhysX RigidBodyAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Unitree/Z1/z1.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Unitree/Dex5/Dex5-URDF-R.usd#
Properties
Number of Joints |
20 |
Number of Links |
21 |
Number of DOFs |
20 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Unitree/Dex3/dex3_1_r.usd#
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
7 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
USD Path: Ufactory/xarm_gripper/xarm_gripper.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Ufactory/xarm7/xarm7.usd#
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
13 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Ufactory/xarm6/xarm6.usd#
Properties
Number of Joints |
13 |
Number of Links |
14 |
Number of DOFs |
12 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Ufactory/uf850/uf850.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Ufactory/lite6_gripper/uf_lite_gripper.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI
PhysX RigidBodyAPI

USD Path: Ufactory/lite6/lite6.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Techman/TM12/tm12.usd#
Properties
Number of Joints |
9 |
Number of Links |
10 |
Number of DOFs |
6 |
Sensors |
Count |
|---|---|
Camera |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
USD Path: ShadowRobot/ShadowHand/shadow_hand.usd#
Properties
Number of Joints |
25 |
Number of Links |
26 |
Number of DOFs |
24 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
USD Path: ShadowRobot/ShadowHand/shadow_hand_instanceable.usd#
Properties
Number of Joints |
25 |
Number of Links |
26 |
Number of DOFs |
24 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
This robot is in Isaac Lab
USD Path: Robotiq/Hand-E/Robotiq_Hand_E_base.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX ArticulationAPI
USD Path: Robotiq/Hand-E/Robotiq_Hand_E_edit.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX ArticulationAPI
USD Path: Robotiq/2F-85/Robotiq_2F_85_edit.usd#
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
6 |
Physics APIs:
PhysX MimicJointAPI
PhysX ArticulationAPI
PhysX JointAPI
USD Path: Robotiq/2F-140/2f140_instanceable.usd#
Properties
Number of Joints |
10 |
Number of Links |
11 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
USD Path: Robotiq/2F-140/Robotiq_2F_140_base.usd#
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
8 |
Physics APIs:
PhysX ArticulationAPI
USD Path: Robotiq/2F-140/Robotiq_2F_140_config.usd#
Properties
Number of Joints |
10 |
Number of Links |
11 |
Number of DOFs |
10 |
Sensor/Accessory |
Count |
|---|---|
Contact Sensor |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX SceneAPI
PhysX ResidualReportingAPI
PhysX MimicJointAPI
USD Path: Robotiq/2F-140/Robotiq_2F_140_physics_edit.usd#
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
8 |
Sensor/Accessory |
Count |
|---|---|
Contact Sensor |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX MimicJointAPI
PhysX JointAPI
USD Path: Robotiq/2F-140/Collected_2f140_instanceable/2f140_instanceable.usd#
Properties
Number of Joints |
10 |
Number of Links |
11 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
USD Path: RobotStudio/so101_new_calib/so101_new_calib.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
USD Path: RobotStudio/so100/so100.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: RethinkRobotics/Sawyer/sawyer_instanceable.usd#
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
8 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
This robot is in Isaac Lab

USD Path: Kuka/KR210_L150/kr210_l150.usd#
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Kinova/Jaco2/J2N7S300/j2n7s300_instanceable.usd#
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
13 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Kinova/Jaco2/J2N6S300/j2n6s300_instanceable.usd#
Properties
Number of Joints |
13 |
Number of Links |
14 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
USD Path: Kinova/Gen3/gen3n7_instanceable.usd#
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
7 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Kawasaki/RS080N/rs080n_onrobot_rg2.usd#
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI

USD Path: Kawasaki/RS025N/rs025n_onrobot_rg2.usd#
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI

USD Path: Kawasaki/RS013N/rs013n_onrobot_rg2.usd#
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI

USD Path: Kawasaki/RS007N/rs007n_onrobot_rg2.usd#
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI

USD Path: Kawasaki/RS007L/rs007l_onrobot_rg2.usd#
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI

USD Path: FrankaRobotics/FrankaPanda/franka.usd#
Properties
Number of Joints |
10 |
Number of Links |
11 |
Number of DOFs |
9 |
Accessories:
AlternateFinger
Default
Robotiq_2F_85
Physics APIs:
PhysX MimicJointAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX RigidBodyAPI

USD Path: FrankaRobotics/FrankaFR3/fr3.usd#
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
9 |
Physics APIs:
PhysX MimicJointAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI

USD Path: FrankaRobotics/FrankaEmika/panda_instanceable.usd#
Properties
Number of Joints |
10 |
Number of Links |
11 |
Number of DOFs |
9 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI

USD Path: FrankaRobotics/FactoryFranka/factory_franka.usd#
Properties
Number of Joints |
11 |
Number of Links |
12 |
Number of DOFs |
9 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI

USD Path: FrankaRobotics/FactoryFranka/factory_franka_instanceable.usd#
Properties
Number of Joints |
11 |
Number of Links |
12 |
Number of DOFs |
9 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
USD Path: Flexiv/Rizon4/flexiv_rizon4.usd#
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
7 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI

USD Path: Festo/FestoCobot/festo_cobot.usd#
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI

USD Path: Fanuc/CRX10IAL/crx10ial.usd#
Properties
Number of Joints |
9 |
Number of Links |
10 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Denso/CobottaPro900/cobotta_pro_900.usd#
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
12 |
Physics APIs:
PhysX MimicJointAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
USD Path: Denso/CobottaPro1300/cobotta_pro_1300.usd#
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
12 |
Physics APIs:
PhysX MimicJointAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI

USD Path: XiaoPeng/PX5/px5.usd#
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
16 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
USD Path: XiaoPeng/PX5/px5_without_housing.usd#
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
16 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI

USD Path: XHumanoid/Tien Kung/tienkung.usd#
Properties
Number of Joints |
59 |
Number of Links |
60 |
Number of DOFs |
54 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
USD Path: Unitree/H1/h1.usd#
Properties
Number of Joints |
24 |
Number of Links |
25 |
Number of DOFs |
19 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Unitree/G1_23dof/g1.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Physics APIs:
PhysX SceneAPI
PhysX CollisionAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Unitree/G1_23dof/g1_minimal.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Physics APIs:
PhysX SceneAPI
PhysX CollisionAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Unitree/G1/g1.usd#
Properties
Number of Joints |
45 |
Number of Links |
46 |
Number of DOFs |
43 |
Physics APIs:
PhysX RigidBodyAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: SanctuaryAI/Phoenix/phoenix.usd#
Properties
Number of Joints |
77 |
Number of Links |
78 |
Number of DOFs |
77 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: RobotEra/STAR1/star1.usd#
Properties
Number of Joints |
55 |
Number of Links |
56 |
Number of DOFs |
55 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Ihmcrobotics/Valkyrie/valkyrie.usd#
Properties
Number of Joints |
25 |
Number of Links |
26 |
Number of DOFs |
25 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
USD Path: FourierIntelligence/GR-1/GR1T2_fourier_hand_6dof/GR1T2_fourier_hand_6dof.usd#
Properties
Number of Joints |
54 |
Number of Links |
55 |
Number of DOFs |
54 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX SceneAPI
PhysX ArticulationAPI
This robot is in Isaac Lab

USD Path: FourierIntelligence/GR-1/GR1T1/GR1_T1.usd#
Properties
Number of Joints |
40 |
Number of Links |
41 |
Number of DOFs |
32 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
USD Path: Agility/Digit/digit_v4.usd#
Properties
Number of Joints |
42 |
Number of Links |
43 |
Number of DOFs |
38 |
Sensors |
Count |
|---|---|
Camera |
4 |
Physics APIs:
PhysX RigidBodyAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX ArticulationAPI
This robot is in Isaac Lab
USD Path: Agility/Cassie/cassie.usd#
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
14 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI

USD Path: Agibot/A2D/A2D.usd#
Properties
Number of Joints |
34 |
Number of Links |
35 |
Number of DOFs |
34 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: 1X/Neo/Neo.usd#
Properties
Number of Joints |
33 |
Number of Links |
34 |
Number of DOFs |
33 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: BoosterRobotics/BoosterT1/T1_locomotion.usd#
Properties
Number of Joints |
23 |
Number of Links |
24 |
Number of DOFs |
23 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Unitree/laikago/laikago.usd#
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
12 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
USD Path: Unitree/aliengo/aliengo.usd#
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
12 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: Unitree/Go2/go2.usd#
Properties
Number of Joints |
38 |
Number of Links |
39 |
Number of DOFs |
12 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Unitree/Go1/go1.usd#
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
12 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Unitree/Go1/go1_sensor.usd#
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
12 |
Sensor/Accessory |
Count |
|---|---|
Contact Sensor |
4 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
USD Path: Unitree/B2/b2.usd#
Properties
Number of Joints |
30 |
Number of Links |
31 |
Number of DOFs |
12 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Unitree/A1/a1.usd#
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
12 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI

USD Path: IsaacSim/Ant/ant.usd#
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
8 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: IsaacSim/Ant/ant_colored.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Physics APIs:
PhysX RigidBodyAPI
PhysX CollisionAPI
PhysX SceneAPI

USD Path: IsaacSim/Ant/ant_instanceable.usd#
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
8 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
This robot is in Isaac Lab

USD Path: BostonDynamics/spot/spot.usd#
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
12 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
This robot is in Isaac Lab

USD Path: ANYbotics/anymal_d/anymal_d.usd#
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: ANYbotics/anymal_c/anymal_c.usd#
Properties
Number of Joints |
17 |
Number of Links |
18 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
USD Path: ANYbotics/anymal_b/anymal_b.usd#
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX JointAPI
PhysX ArticulationAPI

USD Path: NVIDIA/Kaya/kaya.usd#
Properties
Number of Joints |
33 |
Number of Links |
34 |
Number of DOFs |
33 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI

USD Path: NVIDIA/Kaya/kaya_ogn_gamepad.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Physics APIs:
PhysX SceneAPI
PhysX CollisionAPI
PhysX JointAPI
PhysX ArticulationAPI
USD Path: Fraunhofer/O3dyn/o3dyn.usd#
Properties
Number of Joints |
76 |
Number of Links |
77 |
Number of DOFs |
64 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI
USD Path: Fraunhofer/O3dyn/o3dyn_controller.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Physics APIs:
PhysX RigidBodyAPI
PhysX CollisionAPI
PhysX JointAPI
PhysX ArticulationAPI
PhysX SceneAPI
USD Path: Fraunhofer/O3dyn/o3dyn_trimmed.usd#
Properties
Number of Joints |
52 |
Number of Links |
53 |
Number of DOFs |
40 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI
USD Path: NASA/Ingenuity/ingenuity.usd#
Properties
Number of Joints |
4 |
Number of Links |
5 |
Number of DOFs |
4 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX CollisionAPI
USD Path: IsaacSim/Quadcopter/quadcopter.usd#
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
8 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Bitcraze/Crazyflie/cf2x.usd#
Properties
Number of Joints |
4 |
Number of Links |
5 |
Number of DOFs |
4 |
Physics APIs:
PhysX ArticulationAPI
This robot is in Isaac Lab
USD Path: IsaacSim/Vehicle/basic_vehicle_m.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Physics APIs:
PhysX RigidBodyAPI
PhysX CollisionAPI
PhysX SceneAPI

USD Path: IsaacSim/SimpleArticulation/articulation_3_joints.usd#
Properties
Number of Joints |
3 |
Number of Links |
4 |
Number of DOFs |
3 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX CollisionAPI
USD Path: IsaacSim/SimpleArticulation/revolute_articulation.usd#
Properties
Number of Joints |
1 |
Number of Links |
2 |
Number of DOFs |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX CollisionAPI
USD Path: IsaacSim/SimpleArticulation/simple_articulation.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX CollisionAPI

USD Path: IsaacSim/Humanoid28/humanoid_28.usd#
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: IsaacSim/Humanoid/humanoid.usd#
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: IsaacSim/Humanoid/humanoid_instanceable.usd#
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
This robot is in Isaac Lab
USD Path: IsaacSim/DifferentialBase/differential_base.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
USD Path: IsaacSim/Cartpole/cartpole.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
USD Path: IsaacSim/CartDoublePendulum/cart_double_pendulum.usd#
Properties
Number of Joints |
3 |
Number of Links |
4 |
Number of DOFs |
3 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
USD Path: IsaacSim/BalanceBot/balance_bot.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Clearpath/RidgebackUr/ridgeback_ur5.usd#
Properties
Number of Joints |
9 |
Number of Links |
10 |
Number of DOFs |
9 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
USD Path: Clearpath/RidgebackFranka/ridgeback_franka.usd#
Properties
Number of Joints |
18 |
Number of Links |
19 |
Number of DOFs |
12 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
This robot is in Isaac Lab

USD Path: BostonDynamics/spot/spot_with_arm.usd#
Properties
Number of Joints |
19 |
Number of Links |
20 |
Number of DOFs |
19 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI