Data Augmentation#
Example of using Isaac Sim and Replicator to capture augmented synthetic data.
Learning Objectives#
This tutorial provides examples on how to use omni.replicator augmentations on annotators or writers. The provided examples will showcase how to augment rgb and depth annotator data using warp (GPU) or NumPy (CPU) kernel/filters. The use of warp is particularly advantageous for executing parallelizable tasks, especially if the data already resides in the GPUs memory, thus avoiding memory copies from GPU to CPU.
For a better understanding of the tutorial, familiarity with omni.replicator, annotators, writers and warp is recommended.
Scenario#
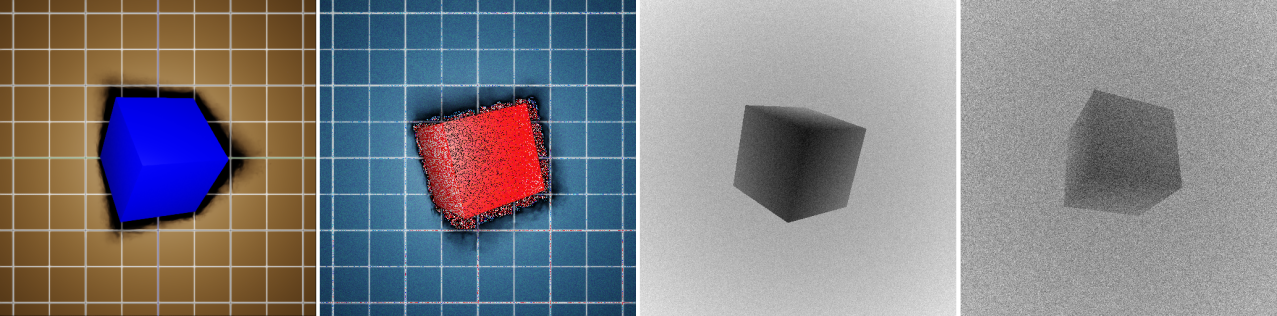
The depicted figure showcases the example augmentations used throughout the examples. The first image is an illustrative example switching the red and blue channels of the image. The second image is a composed augmentation of converting the rgb data to hsv, adding gaussian noise, and converting back to rgb. The third and forth image are results of applying gaussian noise filters with various sigma values to the depth data.
For the example scenario a red cube is spawned with a camera looking at it from a top view. For the cube a replicator randomization graph is created which is triggered by a custom event sent before each capture step, producing a random rotation for every frame capture.
Implementation#
The tutorial is split into two parts, the first example will showcase how to augment annotators directly, and secondly how to augment writers. Both examples can be run as Standalone Applications or from the UI using the Script Editor.
Annotator Augmentation#
The annotator example will output rgb images with the red and blue channels switched, and two depth images with different gaussian noise levels (saved as grayscale PNGs). The example can switch between using warp or NumPy augmentations.
The example can be run as a standalone application using the following commands in the terminal (on Windows use python.bat instead of python.sh):
./python.sh standalone_examples/replicator/augmentation/annotator_augmentation.py --env_url /Isaac/Environments/Grid/default_environment.usd
Optionally the following arguments can be used to change the default behavior:
--env_url– USD environment path relative to the assets root (default: empty scene with dome light and ground plane)--use_warp– flag to use warp (GPU) instead of numpy (CPU) for the augmentation functions (default: False)--num_frames– the number of frames to be captured (default: 25)
./python.sh standalone_examples/replicator/augmentation/annotator_augmentation.py --use_warp --num_frames 25 --env_url /Isaac/Environments/Grid/default_environment.usd
Full Standalone Script
"""Generate augmented synthetic data from annotators."""
from isaacsim import SimulationApp
simulation_app = SimulationApp(launch_config={"headless": False})
import argparse
import os
import time
import carb.settings
import numpy as np
import omni.replicator.core as rep
import omni.usd
import warp as wp
from isaacsim.core.utils.stage import open_stage
from isaacsim.storage.native import get_assets_root_path
from omni.replicator.core.functional import write_image
parser = argparse.ArgumentParser()
parser.add_argument("--num_frames", type=int, default=5, help="The number of frames to capture")
parser.add_argument(
"--use_warp",
action="store_true",
help="Use warp augmentations instead of numpy",
)
parser.add_argument("--resolution", nargs=2, type=int, default=[512, 512], help="Camera resolution")
parser.add_argument("--env_url", type=str, default="", help="USD environment URL (empty for basic scene)")
args, unknown = parser.parse_known_args()
num_frames = args.num_frames
use_warp = args.use_warp
resolution = args.resolution
env_url = args.env_url or None
SEED = 42
# Enable warp scripts
carb.settings.get_settings().set_bool("/app/omni.graph.scriptnode/opt_in", True)
def rgb_to_bgr_np(data_in):
"""Swap RGBA red and blue channels using NumPy (CPU)."""
data_in[:, :, [0, 2]] = data_in[:, :, [2, 0]]
return data_in
@wp.kernel
def rgb_to_bgr_wp(data_in: wp.array3d(dtype=wp.uint8), data_out: wp.array3d(dtype=wp.uint8)):
"""Swap RGBA red and blue channels using Warp (GPU)."""
i, j = wp.tid()
data_out[i, j, 0] = data_in[i, j, 2]
data_out[i, j, 1] = data_in[i, j, 1]
data_out[i, j, 2] = data_in[i, j, 0]
data_out[i, j, 3] = data_in[i, j, 3]
def gaussian_noise_depth_np(data_in, sigma: float, seed: int):
"""Add Gaussian noise to depth values using NumPy (CPU)."""
np.random.seed(seed)
result = data_in.astype(np.float32) + np.random.randn(*data_in.shape) * sigma
return np.clip(result, 0, None).astype(data_in.dtype)
rep.annotators.register_augmentation(
"gn_depth_np", rep.annotators.Augmentation.from_function(gaussian_noise_depth_np, sigma=0.1, seed=SEED)
)
@wp.kernel
def gaussian_noise_depth_wp(
data_in: wp.array2d(dtype=wp.float32), data_out: wp.array2d(dtype=wp.float32), sigma: float, seed: int
):
"""Add Gaussian noise to depth values using Warp (GPU)."""
i, j = wp.tid()
# Unique ID for random seed per pixel
scalar_pixel_id = i * data_in.shape[1] + j
state = wp.rand_init(seed, scalar_pixel_id)
data_out[i, j] = data_in[i, j] + sigma * wp.randn(state)
rep.annotators.register_augmentation(
"gn_depth_wp", rep.annotators.Augmentation.from_function(gaussian_noise_depth_wp, sigma=0.1, seed=SEED)
)
def convert_depth_to_uint8(data):
"""Normalize depth data and convert it to uint8 grayscale."""
if isinstance(data, wp.array):
data = data.numpy()
depth = data.astype(np.float32, copy=False)
depth[np.isinf(depth)] = np.nan
mean_val = np.nanmean(depth)
if np.isnan(mean_val):
mean_val = 0.0
depth = np.nan_to_num(depth, nan=mean_val, copy=False)
min_val = depth.min()
max_val = depth.max()
if max_val <= min_val:
return np.zeros(depth.shape, dtype=np.uint8)
normalized = (depth - min_val) / (max_val - min_val)
return (normalized * 255.0).astype(np.uint8)
def run_example(num_frames: int, resolution: tuple[int, int], use_warp: bool, env_url: str | None = None) -> float:
"""Run the capture pipeline using step() to trigger a randomization and data capture."""
print(f"Running example with num_frames: {num_frames}, resolution: {resolution}, use_warp: {use_warp}")
if env_url is not None and env_url != "":
assets_root_path = get_assets_root_path()
stage_path = assets_root_path + env_url
print(f"Opening stage: {stage_path}")
open_stage(stage_path)
else:
omni.usd.get_context().new_stage()
rep.functional.create.dome_light(intensity=1000, rotation=(270, 0, 0))
ground_plane = rep.functional.create.plane(scale=(10, 10, 1), position=(0, 0, 0))
rep.functional.physics.apply_collider(ground_plane)
# Use a fixed global seed for reproducibility
rep.set_global_seed(SEED)
# Disable capture on play, data is captured manually using the step function
rep.orchestrator.set_capture_on_play(False)
# Set DLSS to Quality mode (2) for best SDG results (Options: 0 (Performance), 1 (Balanced), 2 (Quality), 3 (Auto)
carb.settings.get_settings().set("rtx/post/dlss/execMode", 2)
# Augment the RGB and depth annotators
rgb_to_bgr_augm = rep.annotators.Augmentation.from_function(rgb_to_bgr_wp if use_warp else rgb_to_bgr_np)
depth_aug = rep.annotators.get_augmentation("gn_depth_wp" if use_warp else "gn_depth_np")
rgb_to_bgr_annot = rep.annotators.augment(
source_annotator=rep.annotators.get("rgb"),
augmentation=rgb_to_bgr_augm,
)
depth_annot_1 = rep.annotators.get("distance_to_camera")
depth_annot_1.augment(depth_aug)
depth_annot_2 = rep.annotators.get("distance_to_camera")
depth_annot_2.augment(depth_aug, sigma=0.5)
# Create the render product and attach the annotators to it
cam = rep.functional.create.camera(position=(0, 0, 5), look_at=(0, 0, 0))
rp = rep.create.render_product(cam, resolution)
rgb_to_bgr_annot.attach(rp)
depth_annot_1.attach(rp)
depth_annot_2.attach(rp)
# Create a red cube and randomize its rotation on a custom event sent before each capture step
red_cube = rep.functional.create.cube(position=(0, 0, 0.71))
rep.functional.create.material(mdl="OmniPBR.mdl", bind_prims=[red_cube], diffuse_color_constant=(1, 0, 0))
with rep.trigger.on_custom_event(event_name="randomize_red_cube"):
red_cube_node = rep.get.prim_at_path(red_cube.GetPath())
with red_cube_node:
rep.randomizer.rotation()
# Output directory
out_dir = os.path.join(os.getcwd(), f"_out_augm_annot_{'warp' if use_warp else 'numpy'}")
print(f"Writing data to: {out_dir}")
os.makedirs(out_dir, exist_ok=True)
capture_start = time.time()
for frame_idx in range(num_frames):
print(f" Capturing frame {frame_idx + 1}/{num_frames}")
rep.utils.send_og_event(event_name="randomize_red_cube")
rep.orchestrator.step(rt_subframes=32)
# Get the data from the annotators
rgb_data = rgb_to_bgr_annot.get_data()
depth_data_1 = depth_annot_1.get_data()
depth_data_2 = depth_annot_2.get_data()
# Schedule the write of the data to disk
write_image(path=os.path.join(out_dir, f"annot_rgb_{frame_idx}.png"), data=rgb_data)
write_image(
path=os.path.join(out_dir, f"annot_depth_1_{frame_idx}.png"),
data=convert_depth_to_uint8(depth_data_1),
)
write_image(
path=os.path.join(out_dir, f"annot_depth_2_{frame_idx}.png"),
data=convert_depth_to_uint8(depth_data_2),
)
# Wait for the data to be written to disk and release resources
rep.orchestrator.wait_until_complete()
rgb_to_bgr_annot.detach()
depth_annot_1.detach()
depth_annot_2.detach()
rp.destroy()
return time.time() - capture_start
duration = run_example(num_frames, resolution, use_warp, env_url)
average = duration / num_frames if num_frames else 0.0
mode_label = "warp" if use_warp else "numpy"
print(
f"The duration for capturing {num_frames} frames using '{mode_label}' was: {duration:.4f} seconds, "
f"with an average of {average:.4f} seconds per frame."
)
simulation_app.close()
Full Script Editor Script
import asyncio
import os
import time
import carb.settings
import numpy as np
import omni.replicator.core as rep
import warp as wp
from isaacsim.core.experimental.utils.stage import open_stage
from isaacsim.storage.native import get_assets_root_path_async
from omni.replicator.core.functional import write_image
NUM_FRAMES = 5
RESOLUTION = (512, 512)
USE_WARP = False
ENV_URL = "/Isaac/Environments/Grid/default_environment.usd"
SEED = 42
# Enable warp scripts
carb.settings.get_settings().set_bool("/app/omni.graph.scriptnode/opt_in", True)
def rgb_to_bgr_np(data_in):
"""Swap RGBA red and blue channels using NumPy (CPU)."""
data_in[:, :, [0, 2]] = data_in[:, :, [2, 0]]
return data_in
@wp.kernel
def rgb_to_bgr_wp(data_in: wp.array3d(dtype=wp.uint8), data_out: wp.array3d(dtype=wp.uint8)):
"""Swap RGBA red and blue channels using Warp (GPU)."""
i, j = wp.tid()
data_out[i, j, 0] = data_in[i, j, 2]
data_out[i, j, 1] = data_in[i, j, 1]
data_out[i, j, 2] = data_in[i, j, 0]
data_out[i, j, 3] = data_in[i, j, 3]
def gaussian_noise_depth_np(data_in, sigma: float, seed: int):
"""Add Gaussian noise to depth values using NumPy (CPU)."""
np.random.seed(seed)
result = data_in.astype(np.float32) + np.random.randn(*data_in.shape) * sigma
return np.clip(result, 0, None).astype(data_in.dtype)
rep.annotators.register_augmentation(
"gn_depth_np", rep.annotators.Augmentation.from_function(gaussian_noise_depth_np, sigma=0.1, seed=SEED)
)
@wp.kernel
def gaussian_noise_depth_wp(
data_in: wp.array2d(dtype=wp.float32), data_out: wp.array2d(dtype=wp.float32), sigma: float, seed: int
):
"""Add Gaussian noise to depth values using Warp (GPU)."""
i, j = wp.tid()
# Unique ID for random seed per pixel
scalar_pixel_id = i * data_in.shape[1] + j
state = wp.rand_init(seed, scalar_pixel_id)
data_out[i, j] = data_in[i, j] + sigma * wp.randn(state)
rep.annotators.register_augmentation(
"gn_depth_wp", rep.annotators.Augmentation.from_function(gaussian_noise_depth_wp, sigma=0.1, seed=SEED)
)
def convert_depth_to_uint8(data):
"""Normalize depth data and convert it to uint8 grayscale."""
if isinstance(data, wp.array):
data = data.numpy()
depth = data.astype(np.float32, copy=False)
depth[np.isinf(depth)] = np.nan
mean_val = np.nanmean(depth)
if np.isnan(mean_val):
mean_val = 0.0
depth = np.nan_to_num(depth, nan=mean_val, copy=False)
min_val = depth.min()
max_val = depth.max()
if max_val <= min_val:
return np.zeros(depth.shape, dtype=np.uint8)
normalized = (depth - min_val) / (max_val - min_val)
return (normalized * 255.0).astype(np.uint8)
# Run the capture pipeline using step() to trigger a randomization and data capture
async def run_example_async(num_frames: int, resolution: tuple[int, int], use_warp: bool) -> float:
print(f"Running example with num_frames: {num_frames}, resolution: {resolution}, use_warp: {use_warp}")
# Open a new stage
assets_root_path = await get_assets_root_path_async()
stage_path = assets_root_path + ENV_URL
print(f"Opening stage: {stage_path}")
open_stage(stage_path)
# Use a fixed global seed for reproducibility
rep.set_global_seed(SEED)
# Disable capture on play, data is captured manually using the step function
rep.orchestrator.set_capture_on_play(False)
# Set DLSS to Quality mode (2) for best SDG results (Options: 0 (Performance), 1 (Balanced), 2 (Quality), 3 (Auto)
carb.settings.get_settings().set("rtx/post/dlss/execMode", 2)
# Augment the RGB and depth annotators
rgb_to_bgr_augm = rep.annotators.Augmentation.from_function(rgb_to_bgr_wp if use_warp else rgb_to_bgr_np)
depth_aug = rep.annotators.get_augmentation("gn_depth_wp" if use_warp else "gn_depth_np")
rgb_to_bgr_annot = rep.annotators.augment(
source_annotator=rep.annotators.get("rgb"),
augmentation=rgb_to_bgr_augm,
)
depth_annot_1 = rep.annotators.get("distance_to_camera")
depth_annot_1.augment(depth_aug)
depth_annot_2 = rep.annotators.get("distance_to_camera")
depth_annot_2.augment(depth_aug, sigma=0.5)
# Create the render product and attach the annotators to it
cam = rep.functional.create.camera(position=(0, 0, 5), look_at=(0, 0, 0))
rp = rep.create.render_product(cam, resolution)
rgb_to_bgr_annot.attach(rp)
depth_annot_1.attach(rp)
depth_annot_2.attach(rp)
# Create a red cube and randomize its rotation on a custom event sent before each capture step
red_cube = rep.functional.create.cube(position=(0, 0, 0.71))
rep.functional.create.material(mdl="OmniPBR.mdl", bind_prims=[red_cube], diffuse_color_constant=(1, 0, 0))
with rep.trigger.on_custom_event(event_name="randomize_red_cube"):
red_cube_node = rep.get.prim_at_path(red_cube.GetPath())
with red_cube_node:
rep.randomizer.rotation()
# Output directory
out_dir = os.path.join(os.getcwd(), "_out_augm_annot")
print(f"Writing data to: {out_dir}")
os.makedirs(out_dir, exist_ok=True)
capture_start = time.time()
for frame_idx in range(num_frames):
print(f" Capturing frame {frame_idx + 1}/{num_frames}")
rep.utils.send_og_event(event_name="randomize_red_cube")
await rep.orchestrator.step_async(rt_subframes=32)
# Get the data from the annotators
rgb_data = rgb_to_bgr_annot.get_data()
depth_data_1 = depth_annot_1.get_data()
depth_data_2 = depth_annot_2.get_data()
# Schedule the write of the data to disk
write_image(path=os.path.join(out_dir, f"annot_rgb_{frame_idx}.png"), data=rgb_data)
write_image(
path=os.path.join(out_dir, f"annot_depth_1_{frame_idx}.png"),
data=convert_depth_to_uint8(depth_data_1),
)
write_image(
path=os.path.join(out_dir, f"annot_depth_2_{frame_idx}.png"),
data=convert_depth_to_uint8(depth_data_2),
)
# Wait for the data to be written to disk and release resources
await rep.orchestrator.wait_until_complete_async()
rgb_to_bgr_annot.detach()
depth_annot_1.detach()
depth_annot_2.detach()
rp.destroy()
return time.time() - capture_start
def on_task_done(task: asyncio.Task):
"""Report timing information when capture completes."""
duration = task.result()
average = duration / NUM_FRAMES if NUM_FRAMES else 0.0
mode_label = "warp" if USE_WARP else "numpy"
print(
f"The duration for capturing {NUM_FRAMES} frames using '{mode_label}' was: {duration:.4f} seconds, "
f"with an average of {average:.4f} seconds per frame."
)
task = asyncio.ensure_future(run_example_async(NUM_FRAMES, RESOLUTION, USE_WARP))
task.add_done_callback(on_task_done)
To be able to run the augmentation functions, enable scripting in the settings:
Enable Scripting
# Enable warp scripts
carb.settings.get_settings().set_bool("/app/omni.graph.scriptnode/opt_in", True)
To augment the rgb data we provide for illustrative purposes a function that switches the red and blue channels in the rgb data using NumPy (CPU) and warp (GPU) kernels:
RGB to BGR using Warp and Numpy
def rgb_to_bgr_np(data_in):
"""Swap RGBA red and blue channels using NumPy (CPU)."""
data_in[:, :, [0, 2]] = data_in[:, :, [2, 0]]
return data_in
@wp.kernel
def rgb_to_bgr_wp(data_in: wp.array3d(dtype=wp.uint8), data_out: wp.array3d(dtype=wp.uint8)):
"""Swap RGBA red and blue channels using Warp (GPU)."""
i, j = wp.tid()
data_out[i, j, 0] = data_in[i, j, 2]
data_out[i, j, 1] = data_in[i, j, 1]
data_out[i, j, 2] = data_in[i, j, 0]
data_out[i, j, 3] = data_in[i, j, 3]
For the depth data we use gaussian noise filters. Note that the functions are registered in the annotator registry for later access:
Depth Gaussian Noise using Warp and Numpy
def gaussian_noise_depth_np(data_in, sigma: float, seed: int):
"""Add Gaussian noise to depth values using NumPy (CPU)."""
np.random.seed(seed)
result = data_in.astype(np.float32) + np.random.randn(*data_in.shape) * sigma
return np.clip(result, 0, None).astype(data_in.dtype)
rep.annotators.register_augmentation(
"gn_depth_np", rep.annotators.Augmentation.from_function(gaussian_noise_depth_np, sigma=0.1, seed=SEED)
)
@wp.kernel
def gaussian_noise_depth_wp(
data_in: wp.array2d(dtype=wp.float32), data_out: wp.array2d(dtype=wp.float32), sigma: float, seed: int
):
"""Add Gaussian noise to depth values using Warp (GPU)."""
i, j = wp.tid()
# Unique ID for random seed per pixel
scalar_pixel_id = i * data_in.shape[1] + j
state = wp.rand_init(seed, scalar_pixel_id)
data_out[i, j] = data_in[i, j] + sigma * wp.randn(state)
rep.annotators.register_augmentation(
"gn_depth_wp", rep.annotators.Augmentation.from_function(gaussian_noise_depth_wp, sigma=0.1, seed=SEED)
)
Create the augmentations (warp or NumPy) once using the function directly and once from the registry:
Augmentations using Warp or Numpy
# Augment the RGB and depth annotators
rgb_to_bgr_augm = rep.annotators.Augmentation.from_function(rgb_to_bgr_wp if use_warp else rgb_to_bgr_np)
depth_aug = rep.annotators.get_augmentation("gn_depth_wp" if use_warp else "gn_depth_np")
rgb_to_bgr_annot = rep.annotators.augment(
source_annotator=rep.annotators.get("rgb"),
augmentation=rgb_to_bgr_augm,
)
depth_annot_1 = rep.annotators.get("distance_to_camera")
depth_annot_1.augment(depth_aug)
depth_annot_2 = rep.annotators.get("distance_to_camera")
depth_annot_2.augment(depth_aug, sigma=0.5)
You can also register a new annotator together with its augmentation:
Register Augmentated Annotator
rgb_to_bgr_annot = rep.annotators.augment(
source_annotator=rep.annotators.get("rgb"),
augmentation=rgb_to_bgr_augm,
)
depth_annot_1 = rep.annotators.get("distance_to_camera")
depth_annot_1.augment(depth_aug)
depth_annot_2 = rep.annotators.get("distance_to_camera")
depth_annot_2.augment(depth_aug, sigma=0.5)
Finally create the augmented annotators (1x rgb, 2x depth) and attach them to a render product to generate data:
Annotator Augmentation
# Create the render product and attach the annotators to it
cam = rep.functional.create.camera(position=(0, 0, 5), look_at=(0, 0, 0))
rp = rep.create.render_product(cam, resolution)
rgb_to_bgr_annot.attach(rp)
depth_annot_1.attach(rp)
depth_annot_2.attach(rp)
Writer Augmentation#
The writer example will output gaussian noise augmented RGB and depth annotator data from a writer.
The example can be run as a standalone application using the following commands in the terminal (on Windows use python.bat instead of python.sh):
./python.sh standalone_examples/replicator/augmentation/writer_augmentation.py --env_url /Isaac/Environments/Grid/default_environment.usdOptionally the following arguments can be used to change the default behavior:
--env_url– USD environment path relative to the assets root (default: empty scene with dome light and ground plane)
--use_warp– flag to use warp (GPU) instead of NumPy (CPU) for the augmentation functions (default: False)
--num_frames– the number of frames to be captured (default: 25)./python.sh standalone_examples/replicator/augmentation/writer_augmentation.py --use_warp --num_frames 25 --env_url /Isaac/Environments/Grid/default_environment.usdFull Standalone Script
"""Generate augmented synthetic data from a writer.""" from isaacsim import SimulationApp simulation_app = SimulationApp(launch_config={"headless": False}) import argparse import os import time import carb.settings import numpy as np import omni.replicator.core as rep import omni.usd import warp as wp from isaacsim.core.utils.stage import open_stage from isaacsim.storage.native import get_assets_root_path parser = argparse.ArgumentParser() parser.add_argument("--num_frames", type=int, default=5, help="The number of frames to capture") parser.add_argument( "--use_warp", action="store_true", help="Use warp augmentations instead of numpy", ) parser.add_argument("--resolution", nargs=2, type=int, default=[512, 512], help="Camera resolution") parser.add_argument("--env_url", type=str, default="", help="USD environment URL (empty for basic scene)") args, unknown = parser.parse_known_args() num_frames = args.num_frames use_warp = args.use_warp resolution = args.resolution env_url = args.env_url or None SEED = 42 # Enable warp scripts carb.settings.get_settings().set_bool("/app/omni.graph.scriptnode/opt_in", True) def gaussian_noise_rgb_np(data_in, sigma: float, seed: int): """Add Gaussian noise to RGB data using NumPy (CPU).""" np.random.seed(seed) # Convert to float32 space data_in = data_in.astype(np.float32) # Add Gaussian noise to each channel data_in[:, :, 0] = data_in[:, :, 0] + np.random.randn(*data_in.shape[:-1]) * sigma data_in[:, :, 1] = data_in[:, :, 1] + np.random.randn(*data_in.shape[:-1]) * sigma data_in[:, :, 2] = data_in[:, :, 2] + np.random.randn(*data_in.shape[:-1]) * sigma # Clip to [0, 255] and convert to uint8 data_in = np.clip(data_in, 0, 255).astype(np.uint8) return data_in @wp.kernel def gaussian_noise_rgb_wp( data_in: wp.array3d(dtype=wp.uint8), data_out: wp.array3d(dtype=wp.uint8), sigma: float, seed: int ): """Add Gaussian noise to RGB data using Warp (GPU).""" # Get thread coordinates and image dimensions to calculate unique pixel ID for random generation i, j = wp.tid() dim_i = data_in.shape[0] dim_j = data_in.shape[1] pixel_id = i * dim_i + j # Use pixel_id as offset to create unique seeds for each pixel and channel (ensure independent noise patterns across R,G,B channels) state_r = wp.rand_init(seed, pixel_id + (dim_i * dim_j * 0)) state_g = wp.rand_init(seed, pixel_id + (dim_i * dim_j * 1)) state_b = wp.rand_init(seed, pixel_id + (dim_i * dim_j * 2)) # Apply noise to each channel independently using unique seeds; work in float32 space, then clip and convert to uint8 val_r = wp.float32(data_in[i, j, 0]) + sigma * wp.randn(state_r) val_g = wp.float32(data_in[i, j, 1]) + sigma * wp.randn(state_g) val_b = wp.float32(data_in[i, j, 2]) + sigma * wp.randn(state_b) # Clip to [0, 255] and convert to uint8 data_out[i, j, 0] = wp.uint8(wp.clamp(val_r, 0.0, 255.0)) data_out[i, j, 1] = wp.uint8(wp.clamp(val_g, 0.0, 255.0)) data_out[i, j, 2] = wp.uint8(wp.clamp(val_b, 0.0, 255.0)) data_out[i, j, 3] = data_in[i, j, 3] def gaussian_noise_depth_np(data_in, sigma: float, seed: int): """Add Gaussian noise to depth values using NumPy (CPU).""" np.random.seed(seed) result = data_in.astype(np.float32) + np.random.randn(*data_in.shape) * sigma return np.clip(result, 0, None).astype(data_in.dtype) rep.AnnotatorRegistry.register_augmentation( "gn_depth_np", rep.annotators.Augmentation.from_function(gaussian_noise_depth_np, sigma=0.1, seed=None) ) @wp.kernel def gaussian_noise_depth_wp( data_in: wp.array2d(dtype=wp.float32), data_out: wp.array2d(dtype=wp.float32), sigma: float, seed: int ): """Add Gaussian noise to depth values using Warp (GPU).""" i, j = wp.tid() # Unique ID for random seed per pixel scalar_pixel_id = i * data_in.shape[1] + j state = wp.rand_init(seed, scalar_pixel_id) data_out[i, j] = data_in[i, j] + sigma * wp.randn(state) rep.AnnotatorRegistry.register_augmentation( "gn_depth_wp", rep.annotators.Augmentation.from_function(gaussian_noise_depth_wp, sigma=0.1, seed=None) ) def run_example(num_frames: int, resolution: tuple[int, int], use_warp: bool, env_url: str | None = None) -> float: """Run the capture pipeline using step() to trigger a randomization and data capture.""" print(f"Running example with num_frames: {num_frames}, resolution: {resolution}, use_warp: {use_warp}") if env_url is not None and env_url != "": assets_root_path = get_assets_root_path() stage_path = assets_root_path + env_url print(f"Opening stage: {stage_path}") open_stage(stage_path) else: omni.usd.get_context().new_stage() rep.functional.create.dome_light(intensity=1000, rotation=(270, 0, 0)) ground_plane = rep.functional.create.plane(scale=(10, 10, 1), position=(0, 0, 0)) rep.functional.physics.apply_collider(ground_plane) # Use a fixed global seed for reproducibility rep.set_global_seed(SEED) # Disable capture on play, data is captured manually using the step function rep.orchestrator.set_capture_on_play(False) # Set DLSS to Quality mode (2) for best SDG results (Options: 0 (Performance), 1 (Balanced), 2 (Quality), 3 (Auto) carb.settings.get_settings().set("rtx/post/dlss/execMode", 2) # Augment the annotators rgb_to_hsv_augm = rep.annotators.Augmentation.from_function(rep.augmentations_default.aug_rgb_to_hsv) hsv_to_rgb_augm = rep.annotators.Augmentation.from_function(rep.augmentations_default.aug_hsv_to_rgb) # Augment the RGB and depth annotators gn_rgb_augm = rep.annotators.Augmentation.from_function( gaussian_noise_rgb_wp if use_warp else gaussian_noise_rgb_np, sigma=15.0, seed=SEED ) gn_depth_augm = rep.annotators.get_augmentation("gn_depth_wp" if use_warp else "gn_depth_np") # Create a writer and apply the augmentations to its corresponding annotators out_dir = os.path.join(os.getcwd(), f"_out_augm_writer_{'warp' if use_warp else 'numpy'}") backend = rep.backends.get("DiskBackend") backend.initialize(output_dir=out_dir) print(f"Writing data to: {out_dir}") writer = rep.writers.get("BasicWriter") writer.initialize(backend=backend, rgb=True, distance_to_camera=True, colorize_depth=True) # Apply the augmentations to the RGB and depth annotators augmented_rgb_annot = rep.annotators.get("rgb").augment_compose( [rgb_to_hsv_augm, gn_rgb_augm, hsv_to_rgb_augm], name="rgb" ) writer.add_annotator(augmented_rgb_annot) writer.augment_annotator("distance_to_camera", gn_depth_augm) # Create a camera and a render product and attach them to the writer cam = rep.functional.create.camera(position=(0, 0, 5), look_at=(0, 0, 0)) rp = rep.create.render_product(cam, resolution) writer.attach(rp) # Create a red cube and randomize its rotation on a custom event sent before each capture step red_cube = rep.functional.create.cube(position=(0, 0, 0.71)) rep.functional.create.material(mdl="OmniPBR.mdl", bind_prims=[red_cube], diffuse_color_constant=(1, 0, 0)) with rep.trigger.on_custom_event(event_name="randomize_red_cube"): red_cube_node = rep.get.prim_at_path(red_cube.GetPath()) with red_cube_node: rep.randomizer.rotation() capture_start = time.time() for frame_idx in range(num_frames): print(f" Capturing frame {frame_idx + 1}/{num_frames}") rep.utils.send_og_event(event_name="randomize_red_cube") rep.orchestrator.step(rt_subframes=32) # Wait for the data to be written to disk and release resources rep.orchestrator.wait_until_complete() writer.detach() rp.destroy() return time.time() - capture_start duration = run_example(num_frames, resolution, use_warp, env_url) average = duration / num_frames if num_frames else 0.0 mode_label = "warp" if use_warp else "numpy" print( f"The duration for capturing {num_frames} frames using '{mode_label}' was: {duration:.4f} seconds, " f"with an average of {average:.4f} seconds per frame." ) simulation_app.close()
Full Script Editor Script
import asyncio
import os
import time
import carb.settings
import numpy as np
import omni.replicator.core as rep
import warp as wp
from isaacsim.core.experimental.utils.stage import open_stage
from isaacsim.storage.native import get_assets_root_path_async
NUM_FRAMES = 5
RESOLUTION = (512, 512)
USE_WARP = False
ENV_URL = "/Isaac/Environments/Grid/default_environment.usd"
SEED = 42
# Enable warp scripts
carb.settings.get_settings().set_bool("/app/omni.graph.scriptnode/opt_in", True)
def gaussian_noise_rgb_np(data_in, sigma: float, seed: int):
"""Add Gaussian noise to RGB data using NumPy (CPU)."""
np.random.seed(seed)
# Convert to float32 space
data_in = data_in.astype(np.float32)
# Add Gaussian noise to each channel
data_in[:, :, 0] = data_in[:, :, 0] + np.random.randn(*data_in.shape[:-1]) * sigma
data_in[:, :, 1] = data_in[:, :, 1] + np.random.randn(*data_in.shape[:-1]) * sigma
data_in[:, :, 2] = data_in[:, :, 2] + np.random.randn(*data_in.shape[:-1]) * sigma
# Clip to [0, 255] and convert to uint8
data_in = np.clip(data_in, 0, 255).astype(np.uint8)
return data_in
@wp.kernel
def gaussian_noise_rgb_wp(
data_in: wp.array3d(dtype=wp.uint8), data_out: wp.array3d(dtype=wp.uint8), sigma: float, seed: int
):
"""Add Gaussian noise to RGB data using Warp (GPU)."""
# Get thread coordinates and image dimensions to calculate unique pixel ID for random generation
i, j = wp.tid()
dim_i = data_in.shape[0]
dim_j = data_in.shape[1]
pixel_id = i * dim_i + j
# Use pixel_id as offset to create unique seeds for each pixel and channel (ensure independent noise patterns across R,G,B channels)
state_r = wp.rand_init(seed, pixel_id + (dim_i * dim_j * 0))
state_g = wp.rand_init(seed, pixel_id + (dim_i * dim_j * 1))
state_b = wp.rand_init(seed, pixel_id + (dim_i * dim_j * 2))
# Apply noise to each channel independently using unique seeds; work in float32 space, then clip and convert to uint8
val_r = wp.float32(data_in[i, j, 0]) + sigma * wp.randn(state_r)
val_g = wp.float32(data_in[i, j, 1]) + sigma * wp.randn(state_g)
val_b = wp.float32(data_in[i, j, 2]) + sigma * wp.randn(state_b)
# Clip to [0, 255] and convert to uint8
data_out[i, j, 0] = wp.uint8(wp.clamp(val_r, 0.0, 255.0))
data_out[i, j, 1] = wp.uint8(wp.clamp(val_g, 0.0, 255.0))
data_out[i, j, 2] = wp.uint8(wp.clamp(val_b, 0.0, 255.0))
data_out[i, j, 3] = data_in[i, j, 3]
def gaussian_noise_depth_np(data_in, sigma: float, seed: int):
"""Add Gaussian noise to depth values using NumPy (CPU)."""
np.random.seed(seed)
result = data_in.astype(np.float32) + np.random.randn(*data_in.shape) * sigma
return np.clip(result, 0, None).astype(data_in.dtype)
rep.annotators.register_augmentation(
"gn_depth_np", rep.annotators.Augmentation.from_function(gaussian_noise_depth_np, sigma=0.1, seed=SEED)
)
@wp.kernel
def gaussian_noise_depth_wp(
data_in: wp.array2d(dtype=wp.float32), data_out: wp.array2d(dtype=wp.float32), sigma: float, seed: int
):
"""Add Gaussian noise to depth values using Warp (GPU)."""
i, j = wp.tid()
# Unique ID for random seed per pixel
scalar_pixel_id = i * data_in.shape[1] + j
state = wp.rand_init(seed, scalar_pixel_id)
data_out[i, j] = data_in[i, j] + sigma * wp.randn(state)
rep.annotators.register_augmentation(
"gn_depth_wp", rep.annotators.Augmentation.from_function(gaussian_noise_depth_wp, sigma=0.1, seed=SEED)
)
# Run the capture pipeline using step() to trigger a randomization and data capture
async def run_example_async(num_frames: int, resolution: tuple[int, int], use_warp: bool) -> float:
print(f"Running example with num_frames: {num_frames}, resolution: {resolution}, use_warp: {use_warp}")
# Open a new stage
assets_root_path = await get_assets_root_path_async()
stage_path = assets_root_path + ENV_URL
print(f"Opening stage: {stage_path}")
open_stage(stage_path)
# Use a fixed global seed for reproducibility
rep.set_global_seed(SEED)
# Disable capture on play, data is captured manually using the step function
rep.orchestrator.set_capture_on_play(False)
# Set DLSS to Quality mode (2) for best SDG results (Options: 0 (Performance), 1 (Balanced), 2 (Quality), 3 (Auto)
carb.settings.get_settings().set("rtx/post/dlss/execMode", 2)
# Augment the annotators
rgb_to_hsv_augm = rep.annotators.Augmentation.from_function(rep.augmentations_default.aug_rgb_to_hsv)
hsv_to_rgb_augm = rep.annotators.Augmentation.from_function(rep.augmentations_default.aug_hsv_to_rgb)
# Augment the RGB and depth annotators
gn_rgb_augm = rep.annotators.Augmentation.from_function(
gaussian_noise_rgb_wp if use_warp else gaussian_noise_rgb_np, sigma=15.0, seed=SEED
)
gn_depth_augm = rep.annotators.get_augmentation("gn_depth_wp" if use_warp else "gn_depth_np")
# Create a writer and apply the augmentations to its corresponding annotators
out_dir = os.path.join(os.getcwd(), "_out_augm_writer")
backend = rep.backends.get("DiskBackend")
backend.initialize(output_dir=out_dir)
print(f"Writing data to: {out_dir}")
writer = rep.writers.get("BasicWriter")
writer.initialize(backend=backend, rgb=True, distance_to_camera=True, colorize_depth=True)
# Apply the augmentations to the RGB and depth annotators
augmented_rgb_annot = rep.annotators.get("rgb").augment_compose(
[rgb_to_hsv_augm, gn_rgb_augm, hsv_to_rgb_augm], name="rgb"
)
writer.add_annotator(augmented_rgb_annot)
writer.augment_annotator("distance_to_camera", gn_depth_augm)
# Create a camera and a render product and attach them to the writer
cam = rep.functional.create.camera(position=(0, 0, 5), look_at=(0, 0, 0))
rp = rep.create.render_product(cam, resolution)
writer.attach(rp)
# Create a red cube and randomize its rotation on a custom event sent before each capture step
red_cube = rep.functional.create.cube(position=(0, 0, 0.71))
rep.functional.create.material(mdl="OmniPBR.mdl", bind_prims=[red_cube], diffuse_color_constant=(1, 0, 0))
with rep.trigger.on_custom_event(event_name="randomize_red_cube"):
red_cube_node = rep.get.prim_at_path(red_cube.GetPath())
with red_cube_node:
rep.randomizer.rotation()
capture_start = time.time()
for frame_idx in range(num_frames):
print(f" Capturing frame {frame_idx + 1}/{num_frames}")
rep.utils.send_og_event(event_name="randomize_red_cube")
await rep.orchestrator.step_async(rt_subframes=32)
# Wait for the data to be written to disk and release resources
await rep.orchestrator.wait_until_complete_async()
writer.detach()
rp.destroy()
return time.time() - capture_start
def on_task_done(task: asyncio.Task):
"""Report timing information when capture completes."""
duration = task.result()
average = duration / NUM_FRAMES if NUM_FRAMES else 0.0
mode_label = "warp" if USE_WARP else "numpy"
print(
f"The duration for capturing {NUM_FRAMES} frames using '{mode_label}' was: {duration:.4f} seconds, "
f"with an average of {average:.4f} seconds per frame."
)
task = asyncio.ensure_future(run_example_async(NUM_FRAMES, RESOLUTION, USE_WARP))
task.add_done_callback(on_task_done)
To be able to run the augmentation functions one needs to enable scripting in the settings:
Enable Scripting
# Enable warp scripts
carb.settings.get_settings().set_bool("/app/omni.graph.scriptnode/opt_in", True)
For the rgb (LdrColor) annotator of the writer, we provide gaussian noise functions using NumPy (CPU) and warp (GPU) kernels, applied on the RGB channels of the RGBA provided data format.
RGB Gaussian Noise using Warp and Numpy
def gaussian_noise_rgb_np(data_in, sigma: float, seed: int):
"""Add Gaussian noise to RGB data using NumPy (CPU)."""
np.random.seed(seed)
# Convert to float32 space
data_in = data_in.astype(np.float32)
# Add Gaussian noise to each channel
data_in[:, :, 0] = data_in[:, :, 0] + np.random.randn(*data_in.shape[:-1]) * sigma
data_in[:, :, 1] = data_in[:, :, 1] + np.random.randn(*data_in.shape[:-1]) * sigma
data_in[:, :, 2] = data_in[:, :, 2] + np.random.randn(*data_in.shape[:-1]) * sigma
# Clip to [0, 255] and convert to uint8
data_in = np.clip(data_in, 0, 255).astype(np.uint8)
return data_in
@wp.kernel
def gaussian_noise_rgb_wp(
data_in: wp.array3d(dtype=wp.uint8), data_out: wp.array3d(dtype=wp.uint8), sigma: float, seed: int
):
"""Add Gaussian noise to RGB data using Warp (GPU)."""
# Get thread coordinates and image dimensions to calculate unique pixel ID for random generation
i, j = wp.tid()
dim_i = data_in.shape[0]
dim_j = data_in.shape[1]
pixel_id = i * dim_i + j
# Use pixel_id as offset to create unique seeds for each pixel and channel
state_r = wp.rand_init(seed, pixel_id + (dim_i * dim_j * 0))
state_g = wp.rand_init(seed, pixel_id + (dim_i * dim_j * 1))
state_b = wp.rand_init(seed, pixel_id + (dim_i * dim_j * 2))
# Apply noise to each channel independently using unique seeds
val_r = wp.float32(data_in[i, j, 0]) + sigma * wp.randn(state_r)
val_g = wp.float32(data_in[i, j, 1]) + sigma * wp.randn(state_g)
val_b = wp.float32(data_in[i, j, 2]) + sigma * wp.randn(state_b)
# Clip to [0, 255] and convert to uint8
data_out[i, j, 0] = wp.uint8(wp.clamp(val_r, 0.0, 255.0))
data_out[i, j, 1] = wp.uint8(wp.clamp(val_g, 0.0, 255.0))
data_out[i, j, 2] = wp.uint8(wp.clamp(val_b, 0.0, 255.0))
data_out[i, j, 3] = data_in[i, j, 3]
For the depth annotator of the writer, there are gaussian noise functions using NumPy (CPU) and warp (GPU) kernels, applied on the 2D array of float32 values. The functions are registered in the annotator registry for later access:
Depth Gaussian Noise using Warp and Numpy
def gaussian_noise_depth_np(data_in, sigma: float, seed: int):
"""Add Gaussian noise to depth values using NumPy (CPU)."""
np.random.seed(seed)
result = data_in.astype(np.float32) + np.random.randn(*data_in.shape) * sigma
return np.clip(result, 0, None).astype(data_in.dtype)
rep.AnnotatorRegistry.register_augmentation(
"gn_depth_np", rep.annotators.Augmentation.from_function(gaussian_noise_depth_np, sigma=0.1, seed=None)
)
@wp.kernel
def gaussian_noise_depth_wp(
data_in: wp.array2d(dtype=wp.float32), data_out: wp.array2d(dtype=wp.float32), sigma: float, seed: int
):
"""Add Gaussian noise to depth values using Warp (GPU)."""
i, j = wp.tid()
# Unique ID for random seed per pixel
scalar_pixel_id = i * data_in.shape[1] + j
state = wp.rand_init(seed, scalar_pixel_id)
data_out[i, j] = data_in[i, j] + sigma * wp.randn(state)
rep.AnnotatorRegistry.register_augmentation(
"gn_depth_wp", rep.annotators.Augmentation.from_function(gaussian_noise_depth_wp, sigma=0.1, seed=None)
)
Access the default (rgb) augmentations from replicator:
Built-in Replicator Augmentations
# Augment the annotators
rgb_to_hsv_augm = rep.annotators.Augmentation.from_function(rep.augmentations_default.aug_rgb_to_hsv)
hsv_to_rgb_augm = rep.annotators.Augmentation.from_function(rep.augmentations_default.aug_hsv_to_rgb)
Furthermore the custom augmentations are created (warp or NumPy), after using the function directly and once from the registry:
Augmentations using Warp or Numpy
# Augment the RGB and depth annotators
gn_rgb_augm = rep.annotators.Augmentation.from_function(
gaussian_noise_rgb_wp if use_warp else gaussian_noise_rgb_np, sigma=15.0, seed=SEED
)
gn_depth_augm = rep.annotators.get_augmentation("gn_depth_wp" if use_warp else "gn_depth_np")
Finally the writer is created and initialized to use the rgb and depth (distance_to_camera) annotators. The built-in rgb annotator is replaced by a new augmented one by using the same name="rgb" name and adding it to the writer (add_annotator). The augmented RGB annotator uses a composition by switching the data to hsv, adding gaussian noise, and switching back to RGB. The distance_to_camera annotator is augmented by using the built-in augment_annotator function:
Writer Augmentation
# Create a writer and apply the augmentations to its corresponding annotators
out_dir = os.path.join(os.getcwd(), f"_out_augm_writer_{'warp' if use_warp else 'numpy'}")
backend = rep.backends.get("DiskBackend")
backend.initialize(output_dir=out_dir)
print(f"Writing data to: {out_dir}")
writer = rep.writers.get("BasicWriter")
writer.initialize(backend=backend, rgb=True, distance_to_camera=True, colorize_depth=True)
# Apply the augmentations to the RGB and depth annotators
augmented_rgb_annot = rep.annotators.get("rgb").augment_compose(
[rgb_to_hsv_augm, gn_rgb_augm, hsv_to_rgb_augm], name="rgb"
)
writer.add_annotator(augmented_rgb_annot)
writer.augment_annotator("distance_to_camera", gn_depth_augm)
# Create a camera and a render product and attach them to the writer
cam = rep.functional.create.camera(position=(0, 0, 5), look_at=(0, 0, 0))
rp = rep.create.render_product(cam, resolution)
writer.attach(rp)