April Tags#
Learning Objectives#
In this example, we show how to detect April Tags in a scene.
Getting Started#
Prerequisites
ROS bridge is enabled.
Completed Cameras and Transform Trees and Odometry.
Install the apriltag-ros package for April Tag detection.
noetic_wswas sourced.
Detect April Tags#
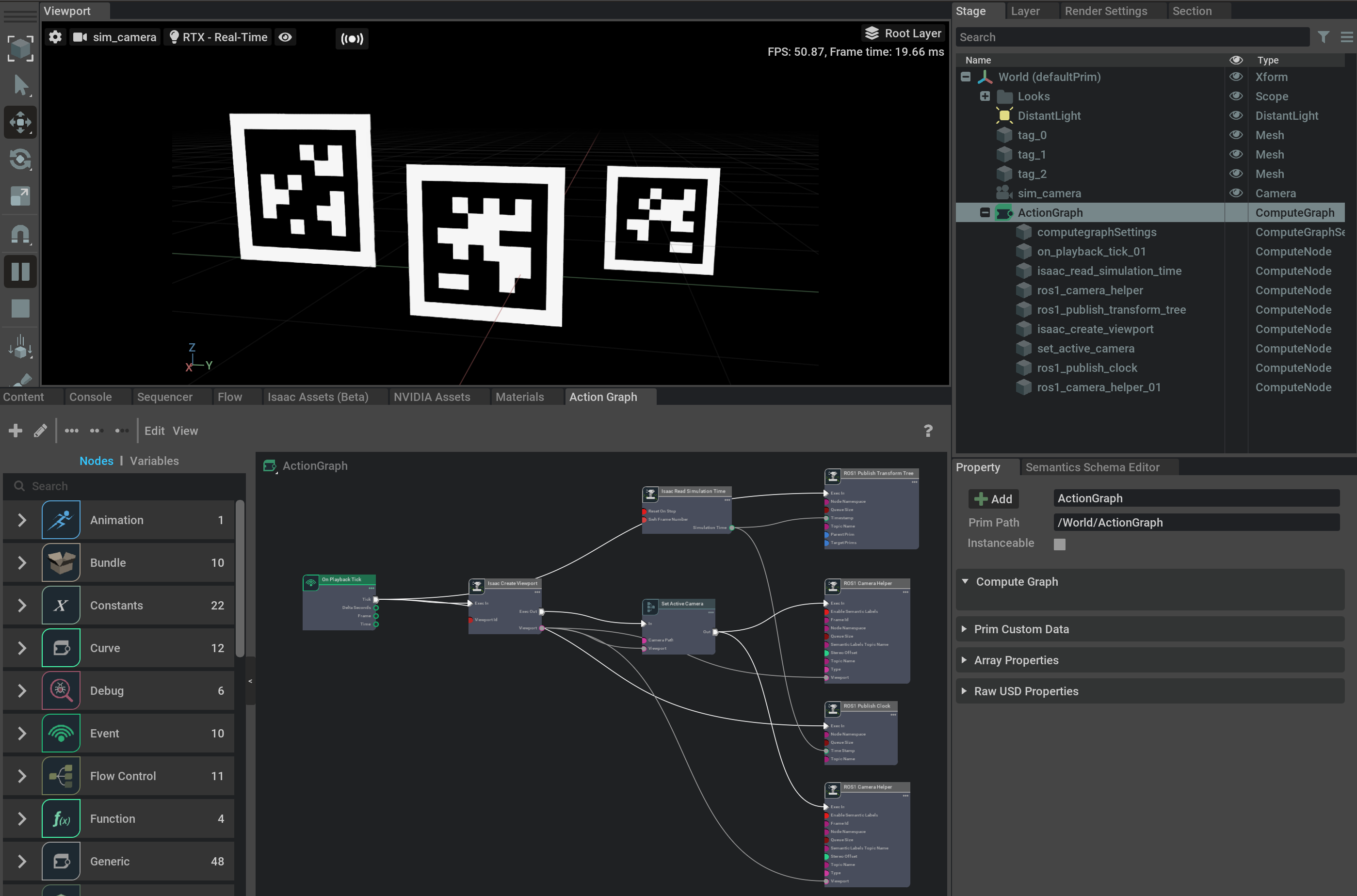
Open the April Tag example by going to Window > Examples > Robotics Examples, and then click on the Robotics Examples tab and expand the sections on the left hand side and open the example: ROS > April Tag. Three April Tags will show up in the viewport.
Open up the Stage Tree, and then open the ActionGraph by right-clicking on the prim and selecting Open Graph. The ROS Clock publisher, TF publisher and Camera Helper nodes (for initiating the camera_info and rgb image publishers) should already be setup.
Press Play to start publishing data to ROS
In a new terminal with your ROS environment sourced, run
roslaunch isaac_tutorials apriltag_continuous_detection.launchto run the april_tag detection node.In a new terminal with your ROS environment sourced, run
rviz -d <noetic_ws>/src/isaac_tutorials/rviz/apriltag_config.rvizto start rviz and show the detections from the camera image.To see the raw data for the detected tags run
rostopic echo tag_detections.

Summary#
This tutorial shows the basics of detecting April Tags in NVIDIA Isaac Sim.
Next Steps#
Continue on to the next tutorial in our ROS Tutorials series.
Further Learning#
More on April Tags with ROS
If you wish to attach your own April Tag to objects, instructions are in April Tags