9.5. Transferring Policies from Isaac Gym Preview Releases
Current users of Isaac Gym Preview Releases may be interested in transferring a policy trained using an Isaac Gym Preview Release to Isaac Sim with the new Omniverse Isaac Gym. This section delineates some of the differences between the Isaac Gym Preview Releases and the Isaac Sim RL extensions in hopes of facilitating the process of transferring policies trained in the Isaac Gym Preview Releases to Isaac Sim.
9.5.1. Learning Objectives
In this tutorial, we will walk through some key differences between Isaac Gym Preview Releases and Isaac Sim. We will cover
Differences in quaternion convention and joint ordering
Differences in physics parameters and APIs
Differences in task and training configuration files
10-15 Minute Tutorial
9.5.2. Getting Started
Please refer to previous tutorials in the Reinforcement Learning Tutorials series to learn about RL extensions in Isaac Sim.
Please refer to Isaac Gym for more details on Standalone Isaac Gym.
9.5.3. Quaternion Convention
The Isaac Sim RL extensions use various classes and methods in omni.isaac.core,
which adopts wxyz as the quaternion convention. However, the quaternion
convention used in Isaac Gym Preview Releases is xyzw. Therefore, if a policy
trained in one of the Isaac Gym Preview Releases takes in quaternions as part
of its observations, remember to switch all quaternions to use the xyzw convention
in the observation buffer self.obs_buf. Similarly, please ensure all quaternions
are in wxyz before passing them in any of the utility functions in omni.isaac.core.
9.5.4. Joint Order
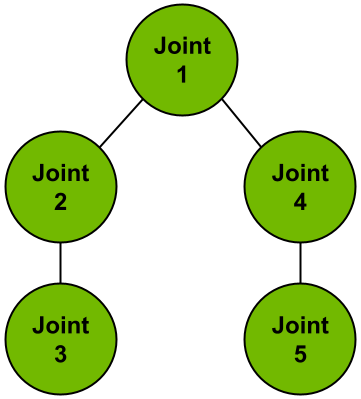
Isaac Sim’s ArticulationView in omni.isaac.core assumes a breadth-first
ordering for the joints in a given kinematic tree. Specifically, for the following
kinematic tree, the method ArticulationView.get_joint_positions returns a
tensor of shape (number of articulations in the view, number of joints in the articulation).
Along the second dimension of this tensor, the values represent the articulation’s joint positions
in the following order: [Joint 1, Joint 2, Joint 4, Joint 3, Joint 5]. On the other hand,
the Isaac Gym Preview Releases assume a depth-first ordering for the joints in the kinematic
tree; In the example below, the joint orders would be the following: [Joint 1, Joint 2, Joint 3, Joint 4, Joint 5].
With this in mind, it is important to change the joint order to depth-first in
the observation buffer before feeding it into an existing policy trained in one of the
Isaac Gym Preview Releases. Similarly, you would also need to change the joint order
in the output (the action buffer) of the Isaac Gym Preview Release trained policy
to breadth-first before applying joint actions to articulations via methods in ArticulationView.
9.5.5. Physics Parameters
One factor that could dictate the success of policy transfer from Isaac Gym Preview
Releases to Isaac Sim is to ensure the physics parameters used in both simulations are
identical or very similar. In general, the sim parameters specified in the
task configuration yaml file overwrite the corresponding parameters in the USD asset.
However, there are additional parameters in the USD asset that are not included
in the task configuration yaml file. These additional parameters may sometimes
impact the performance of Isaac Gym Preview Release trained policies and hence need
modifications in the USD asset itself to match the values set in Isaac Gym Preview Releases.
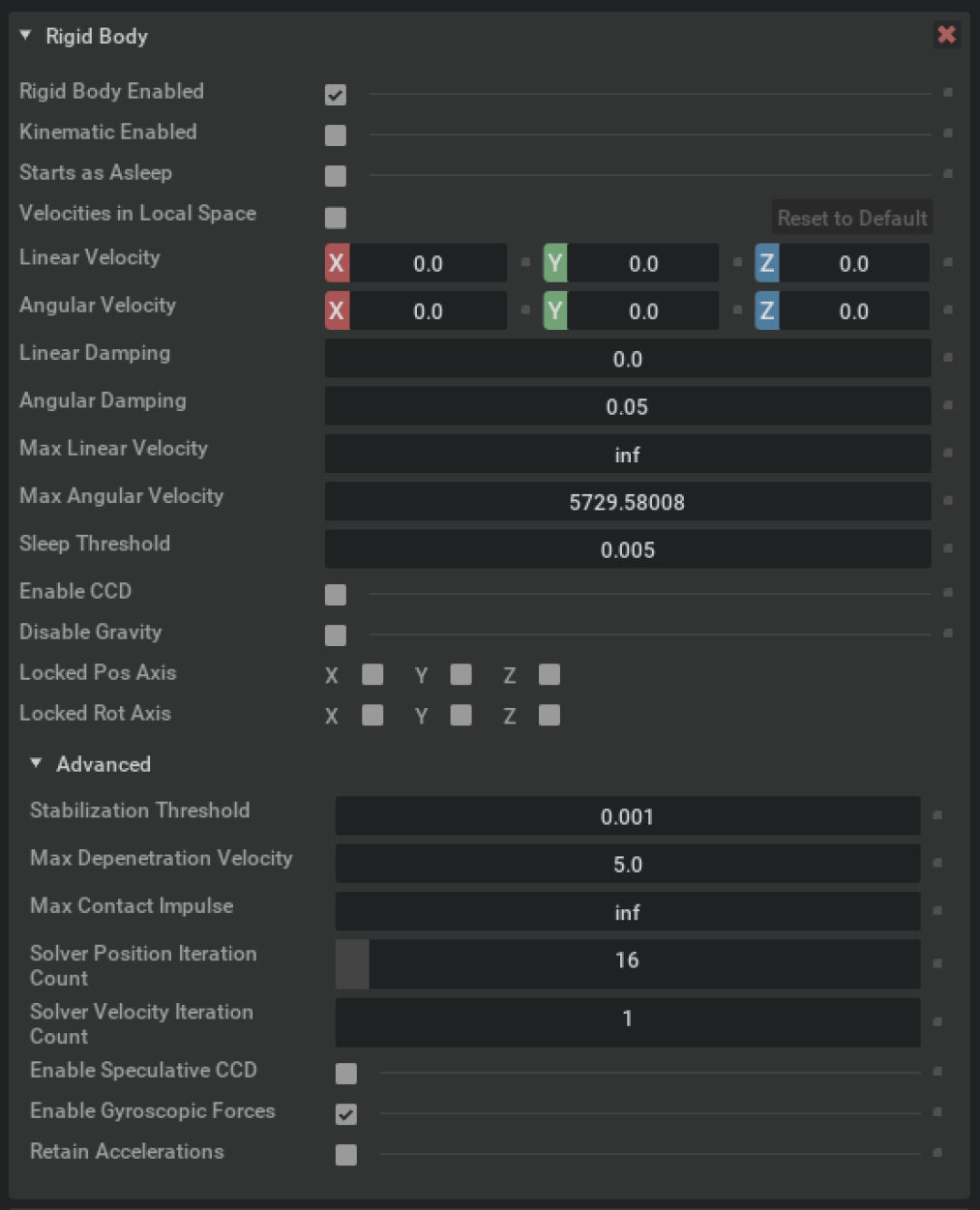
For instance, the following parameters in the RigidBodyAPI could be modified in the
USD asset to yield better policy transfer performance:
RigidBodyAPI Parameter |
Default Value in Isaac Sim |
Default Value in Isaac Gym Preview Releases |
|---|---|---|
Linear Damping |
0.00 |
0.00 |
Angular Damping |
0.05 |
0.0 |
Max Linear Velocity |
inf |
1000 |
Max Angular Velocity |
5729.58008 (degree/s) |
64.0 (rad/s) |
Max Contact Impulse |
inf |
1e32 |
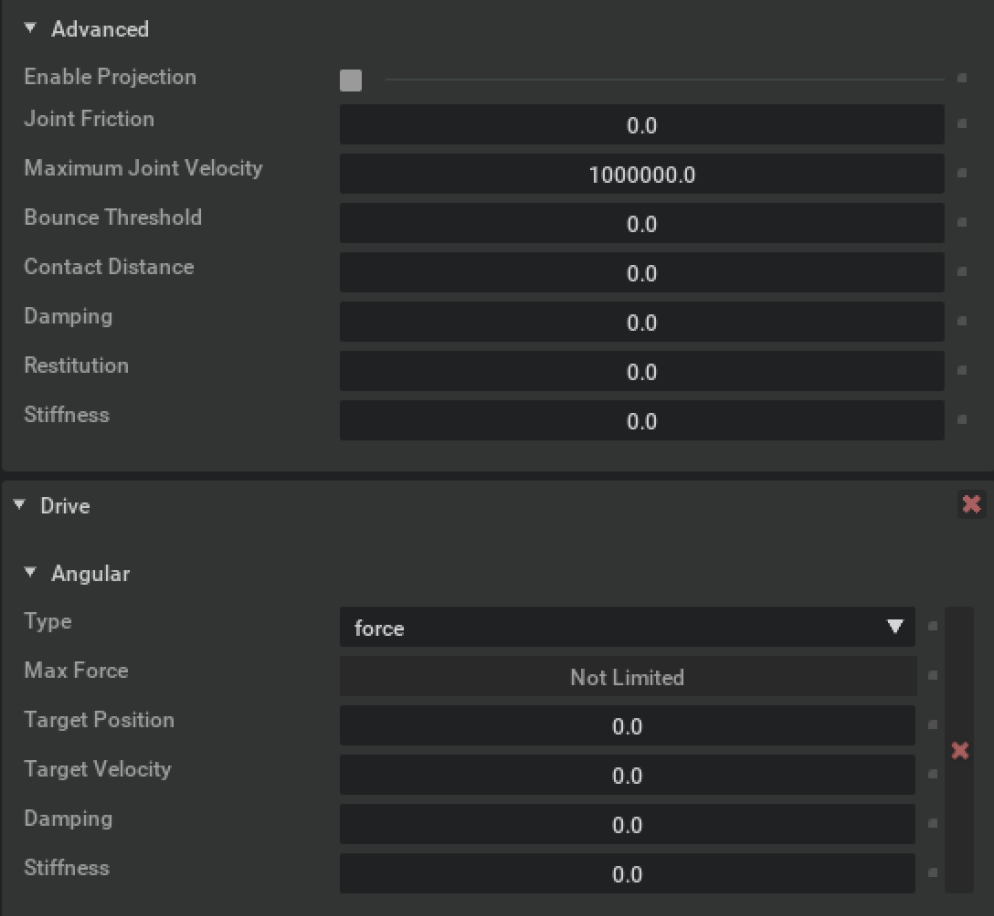
Parameters in the JointAPI as well as the DriveAPI could be altered as well. Note
that the Isaac Sim UI assumes the unit of angle to be degrees. It is particularly
worth noting that the Damping and Stiffness paramters in the DriveAPI have the unit
of 1/deg in the Isaac Sim UI but 1/rad in Isaac Gym Preview Releases.
Joint Parameter |
Default Value in Isaac Sim |
Default Value in Isaac Gym Preview Releases |
|---|---|---|
Maximum Joint Velocity |
1000000.0 (deg) |
100.0 (rad) |
9.5.6. Differences in API
APIs for accessing physics states in Isaac Sim require the creation of an ArticulationView or RigidPrimView object. Multiple view objects can be initialized for different articulations or bodies in the scene by defining a regex expression that matches the paths of the desired objects. This approach eliminates the need of retrieving body handles to slice states for specific bodies in the scene.
We have also removed acquire and refresh APIs in Isaac Sim. Physics states can be directly applied or retrieved
by using set / get APIs defined for the views.
New APIs provided in Isaac Sim no longer require explicit wrapping and un-wrapping of underlying buffers.
APIs can now work with tensors directly for reading and writing data. Most APIs in Isaac Sim also provide
the option to specify an indices parameter, which can be used when reading or writing data for a subset
of environments. Note that when setting states with the indices parameter, the shape of the states buffer
should match with the dimension of the indices list.
Note some naming differences between APIs in Isaac Gym Preview Release and Isaac Sim. Most dof related APIs have been
named to joint` in Isaac Sim. ``root_states is now separated into different APIs for world_poses and velocities.
Similary, dof_states are retrieved individually in Isaac Sim as joint_positions and joint_velocities.
APIs in Isaac Sim also no longer follow the explicit _tensors or _tensor_indexed suffixes in naming.
Indexed versions of APIs now happen implicitly through the optional indices parameter.
As part of our API improvements, we are defining a new set of contact APIs that aim to provide more useful details
on contacts and collisions. This will be a replacement of net_contact_force in the Isaac Gym Preview Release and
will be available in the next release of Isaac Sim. For now, Isaac Sim does not provide a tensorized API for
collecting contacts.
9.5.7. Task Configuration Files
There are a few modifications that need to be made to an existing Isaac Gym Preview Release
task yaml file in order for it to be compatible with the Isaac Sim RL extensions.
9.5.7.1. Frequencies of Physics Simulation and RL Policy
The way in which physics simulation frequency and RL policy frequency are specified is different
between Isaac Gym Preview Releases and Isaac Sim, dictated by the following three
parameters: dt, substeps, and controlFrequencyInv.
dt: The simulation time difference between each simulation step.substeps: The number of physics steps within one simulation step. i.e. ifdt: 1/60` and ``substeps: 4, physics is simulated at 240 hz and 4 physics step will run per rendering step.controlFrequencyInv: The control decimation of the RL policy, which is the number of simulation steps between RL actions. i.e. ifdt: 1/60andcontrolFrequencyInv: 2, RL policy is running at 30 hz.
In Isaac Gym Preview Releases, all three of the above parameters are used to specify
the frequencies of physics simulation and RL policy. However, Isaac Sim only uses controlFrequencyInv and dt as substeps is always fixed at 1. Note that despite
only using two parameters, Isaac Sim can still achieve the same substeps definition
as Isaac Gym. For example, if in an Isaac Gym Preview Release policy, we set substeps: 2,
dt: 1/60 and controlFrequencyInv: 1, we can achieve the equivalent in Isaac Sim
by setting controlFrequencyInv: 2 and dt: 1/120.
In the Isaac Sim RL extensions, dt is specified in the task configuration yaml file
under sim, whereas controlFrequencyInv is a parameter under env.
9.5.7.2. Physx Parameters
Parameters under physx in the task configuration yaml file remain mostly unchanged.
In Isaac Gym Preview Releases, use_gpu is frequently set to
${contains:"cuda",${....sim_device}}. For Isaac Sim, please ensure this is changed
to ${eq:${....sim_device},"gpu"}.
In Isaac Gym Preview Releases, GPU buffer sizes are specified using the following two parameters: default_buffer_size_multiplier and max_gpu_contact_pairs. With the Isaac Sim RL extensions, these two parameters are no longer used; instead, the various GPU buffer sizes can be set explicitly. For instance, GPU buffer sizes for the humanoid task are specified as follows:
gpu_max_rigid_contact_count: 524288
gpu_max_rigid_patch_count: 81920
gpu_found_lost_pairs_capacity: 8192
gpu_found_lost_aggregate_pairs_capacity: 262144
gpu_total_aggregate_pairs_capacity: 8192
gpu_max_soft_body_contacts: 1048576
gpu_max_particle_contacts: 1048576
gpu_heap_capacity: 67108864
gpu_temp_buffer_capacity: 16777216
gpu_max_num_partitions: 8
9.5.7.3. Articulation Parameters
The articulation parameters of each actor can now be individually specified tn the Isaac Sim
task configuration yaml file. The following is an example template for setting these parameters:
ARTICULATION_NAME:
# -1 to use default values
override_usd_defaults: False
fixed_base: False
enable_self_collisions: True
enable_gyroscopic_forces: True
# per-actor
solver_position_iteration_count: 4
solver_velocity_iteration_count: 0
sleep_threshold: 0.005
stabilization_threshold: 0.001
# per-body
density: -1
max_depenetration_velocity: 10.0
9.5.7.4. Additional Simulation Parameters
use_flatcache: Setting this paramter to
Trueenables PhysX Flatcache, which offers a significant increase in simulation speed. However, this parameter must be set toFalseif soft-body simulation is required because PhysX Flatcache curently only supports rigid-body simulation.enable_scene_query_support: Setting this paramter to
Trueallows the user to interact with prims in the scene. Keeping this setting toFalseduring training improves simulation speed. Note that this parameter is always set toTrueif in test/inference mode to enable user interaction with trained models.
9.5.8. Training Configuration Files
The Omniverse Isaac Gym RL Environments are trained using a third-party highly-optimized RL library,
rl_games, which is also used to train the Isaac Gym Preview Release examples
in IsaacGymEnvs. Therefore, the rl_games training
configuration yaml files in Isaac Sim are compatible with those from IsaacGymEnvs. However, please
add the following lines under config in the training configuration yaml files to ensure
RL training runs on the intended device.
device: ${....rl_device}
device_name: ${....rl_device}
9.5.9. Summary
This tutorial covered the following topics:
Differences in quaternion convention and joint ordering between Isaac Sim and Isaac Gym Preview Release
Differences in physics parameters and APIs between Isaac Sim and Isaac Gym Preview Release
Differences in task and training configuration files between Isaac Sim and Isaac Gym Preview Release
9.5.9.1. Next Steps
Continue on to the next tutorial in our Reinforcement Learning Tutorials series, Getting Started with Cloner, to learn about using the Cloner interface for scene generation for reinforcement learning.