Replicator Composer Manual
Note
Replicator Composer is deprecated. Please view the documentation for Replicator YAML.
Replicator Composer is a tool for creating parameterizable offline datasets in Isaac Sim.
This page explains how to write the input parameter file.
The Replicator Composer Parameter List provides the list of input parameters.
The Replicator Composer Tutorial explains how to run Replicator Composer.
Sections
Distributions - Documentation for Distribution types. Parameters set to distributions enable random datasets.
Profiles - How to incorporate re-usable parameter sets.
Groups - How to add objects and lights to a scene using a parameter group.
Asset Lists - How to create an Asset List file.
Paths - Various rules for resolving paths in Replicator Composer.
Units - Units of parameters.
Optimizing Dataset - How to speed up dataset generation and reduce dataset size.
Parameterization
Each parameter has one value type: number, string, bool, or tuple.
A parameter can be set to one of the following:
A deterministic value: a primitive like
5,False, or(255, 0, 0)A stochastic value: a Distribution
A stochastic value is defined as a Distribution which, when sampled, outputs a primitive value. Distributions are sampled during runtime.
Note, all parameter values are written in Python syntax.
Distributions
Note, all distributions are using omni.replicator.core distributions, please see the docs there.
Uniform Distribution
Constructor(s)
Uniform(min_val: float, max_val: float)
Behavior
Returns a float between min_val and max_val.
Example(s)
obj_scale: Uniform(0.5, 1.5)
obj_color: Uniform((0, 0, 0), (1, 1, 1))
Normal Distribution
Constructor(s)
Normal(mean: float, var: float)
Behavior
Returns Gaussian (centered at mean with standard deviation std).
Example(s)
obj_color: Normal((0.5, 0.5, 0.5), (0.1, 0.1, 0.1))
obj_vel: Normal((0, 0, 0), (100, 100, 100))
camera_coord: Normal((0, 0, 0), (500, 500, 500))
Range Distribution
Note, Range Distribution is using omni.replicator.core.distributions.uniform. But for backward compatibility, we support the Range syntax.
Constructor(s)
Range(min_val: int, max_val: int)
Behavior
Returns an integer between min_val and max_val.
Example(s)
obj_count: Range(0, 10)
Choice Distribution
Constructor(s)
Choice(choices: List[Any], p(optional): List[float], with_replacements(optional): bool=True)
Behavior
input_list.weights, where weights will be normalized.with_replacements==True, allow re-sampling the same element. If with_replacements==False, each element can only be sampled once.Example(s)
obj_color: Choice([(1, 0, 0), (0, 1, 0), (0, 0, 1)])
obj_model: Choice(["assets/models/shapes.txt"])
obj_model: Choice(["assets/models/warehouse.txt", "assets/models/hospital.txt", "/Isaac/Props/Forklift/forklift.usd"])
Walk Distribution
Constructor(s)
Walk(input_list: List[Any], ordered=True: bool)
Walk(file: str, ordered=True: bool)
Behavior
Identical to a Choice, except elements are sampled w/o replacement until the input_list is empty. Once
empty, the list is re-populated.
If
orderedisTrue: elements in the list are sampled by walking from start to end.If
orderedisFalse: elements in the list are sampled randomly with removal.
Example(s)
obj_color: Walk("assets/colors/macbeth_chart.txt")
camera_coord: Walk("assets/coords/camera_trajectory.txt")
Profiles
profiles key provides a list of parameter files that each supply a parameter set.The first (top) parameter file will override the parameters of the second parameter file, and so on.
The profile file
parameters/profiles/default.yamlis automatically set as the lowest parameter set (which provides all default parameter values). Note,parameters/profiles/default.yamlis not suggested to be changed.The input parameter file is automatically set as the highest parameter set.
Note, profiles defined within a profile parameter file will be ignored.
Profiles can define groups to create inheritable groups (see Group Inheritance).
The following input.yaml contains three profiles:
...
profiles:
- parameters/profiles/hawk_camera.yaml # provides camera parameters tuned to the Hawk camera
- parameters/profiles/obj_classes.yaml # provides useful inheritable object parameter groups
- parameters/profiles/mtrepte_default.yaml # default parameter set tuned to mtrepte's preferences
Which creates the following parameter set stack:
1. input.yaml
2. hawk_camera.yaml
3. obj_classes.yaml
4. mtrepte_default.yaml
5. default.yaml
Groups
A group is a set of object and/or light parameters (parameters prefixed with obj_* or light_*). A group is nested with a unique group name. Group names cannot be prefixed with obj_ or light_.
For instance, the 4 groups defined in the following input.yaml.
# flying cube
group_a:
obj_model: /Isaac/Props/Shapes/cube.usd
obj_count: 1
# dropped warehouse objects
group_b:
obj_model: Choice(["assets/models/warehouse.txt"])
obj_count: Range(0, 20)
obj_physics: True
# colorful flying lights
group_c:
light_color: Uniform((0, 0, 0), (1, 1, 1))
light_count: Range(0, 5)
# warm ceiling lights
group_d:
light_temp: 3000
light_temp_enabled: True
light_count: 4
light_coord_camera_relative: False
...
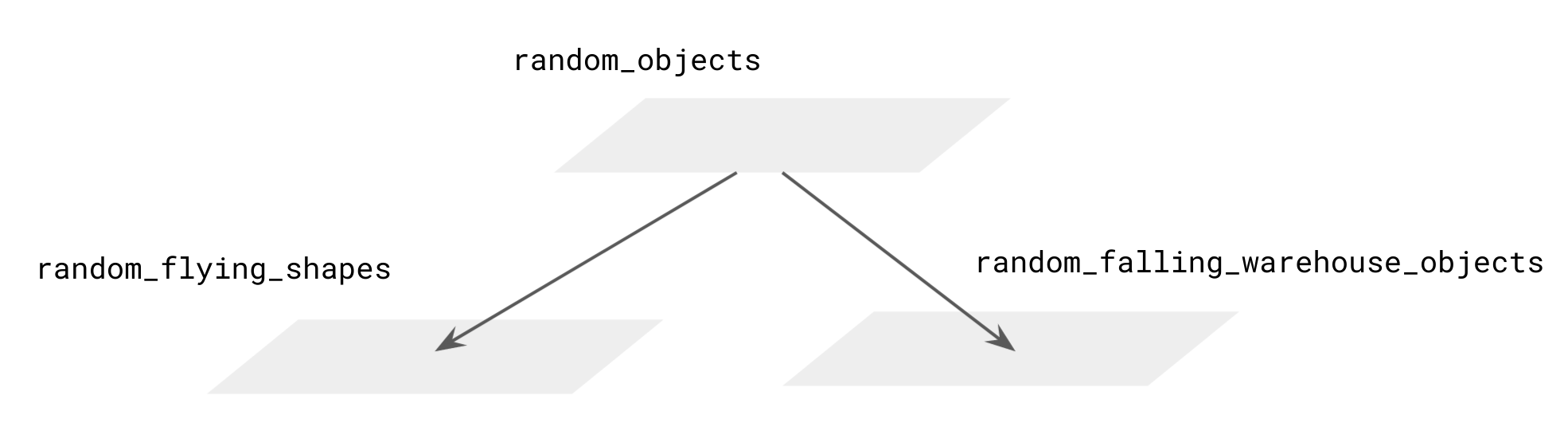
Group Inheritance
For instance, the following profile.yaml
random_objects:
obj_model: /Isaac/Props/Shapes/cube.usd
obj_count: 0 # prevents objects of this group from spawning
obj_rot: Uniform((0, 0, 0), (360, 360, 360))
obj_size: Uniform(100, 200)
obj_reflectance: Uniform(0, 1)
obj_metallicness: Uniform(0, 1)
and input.yaml
random_flying_shapes:
obj_model: Choice(["assets/models/shapes.txt"])
obj_count: Range(0, 10)
inherit: random_objects
random_falling_warehouse_objects:
obj_model: Choice(["assets/models/warehouse.txt"])
obj_count: 5
obj_physics: True
inherit: random_objects
...
profiles:
- parameters/profiles/profile.yaml
Creates this object group polymorphism:
Asset Lists
Parameters set to Choice distributions can point to TXT files called Asset Lists, where each line provides an element in the element list of a Choice.
These lists can contain colors, object model paths, object textures paths, camera coordinates, etc.
For instance, the following input.yaml
random_shapes:
obj_model: Choice(["assets/models/shapes.txt"])
obj_color: Choice(["assets/colors/macbeth_chart.txt", (1, 0, 0)])
obj_count: Range(0, 20)
with models/shapes.txt
/Isaac/Props/Shapes/cube.usd
/Isaac/Props/Shapes/sphere.usd
/Isaac/Props/Shapes/cylinder.usd
...
with colors/macbeth_chart.txt
(0.06, 0.55, 0.87)
(0.48, 0.8, 0.87)
(0.6, 0.33, 0.62)
(0.54, 0.51, 0.84)
(0.68, 0.56, 0.42)
...
Paths
There are four ways paths in the input parameterization and command line arguments are resolved.
Nucleus Server Paths
nucleus_server + path./.For instance, for the following input.yaml file
forklift_texture_randomized:
obj_model: /Isaac/Props/Forklifts/forklift.usd
obj_texture: Choice(["assets/textures/photos.txt"])
obj_count: 1
...
nucleus_server: localhost
With this textures/photos.txt file
/Users/mtrepte/photos/gravel.png
/Users/mtrepte/photos/basket_weave.png
The paths resolve as follows
omniverse://localhost/Isaac/Props/Forklifts/forklift.usd
omniverse://localhost/Users/mtrepte/photos/gravel.png
omniverse://localhost/Users/mtrepte/photos/basket_weave.png
Note, if nucleus fails to find the asset on nucleus server, it will treat the path as an absolute path and tries to find the asset locally.
Mounted Paths
Else if the path is prefixed by *, the path is resolved as <mount> + <path>. The
<mount> is provided from the command line argument --mount.
For instance, for the following input.yaml
forklifts:
obj_model: Choice(["*/assets/models/forklifts.txt"])
obj_count: Range(0, 5)
With the cmd
$ ./python.sh tools/composer/src/main.py \
--input */parameters/forklift_in_warehouse.yaml \
--mount /home/mtrepte/replicator-workspace
Then paths resolve as follows
/home/mtrepte/replicator-workspace/parameters/forklift_in_warehouse.yaml
/home/mtrepte/replicator-workspace/assets/models/forklifts.txt
Absolute Paths
Else if the path is prefixed by /, the path is resolved as path (absolute path).
For instance, for the following input.yaml file
forklifts:
obj_model: Choice("/home/mtrepte/replicator-workspace/assets/models/forklifts.txt")
obj_count: Range(0, 5)
The paths resolve as follows
/home/mtrepte/replicator-workspace/assets/models/forklifts.txt
Relative Paths
Else the path is relative to the Replicator Composer folder in the Isaac Sim source.
The path is resolved as <package_path>/tools/composer + <path>
For instance, for this input.yaml
texture_randomized_objects:
obj_model: Choice("assets/models/office.txt")
obj_texture: Choice("assets/textures/synthetic.txt)
obj_count: Range(0, 5)
Then the paths resolve as follows
<package_path>/tools/composer/assets/models/office.txt
<package_path>/tools/composer/assets/textures/synthetic.txt
Units
The units of parameters that refer to physical lengths are in scene units (determined by scene_meters_per_unit, which defaults to 1, which means 1 meter contains 1 scene unit), except for focal_length [mm] and horiz/vert}_aperture [mm].
Depth maps are in scene_meters_per_unit.
All rotation is in degrees.
Optimizing Dataset
Ways to speed-up generation and reduce storage footprint.
Speed up Generation
Loading many objects and textures slows generation. Reducing obj_count and material / texture complexity can help.
Also, setting obj_physics to True slows generation and reducing physics_simulate_time can help.
Reduce Dataset Size
Setting groundtruth_stereo to False and / or groundtruth_visuals to False can help.
Also, disable any output types that are not needed.