Camera Calibration (Omni.Replicator.Agent.Camera_calibration)
Omni.Replicator.Agent.Camera_calibration provides camera information for cameras generated by the Omni.Replicator.Agent (ORA) extension. You can use this extension to select a top-view camera within the stage to create the stage layout. Details including camera direction, location, and FOV polygon information are also captured and saved as a JSON file. For each camera generated by ORA, the FOV polygon is visually represented in the stage layout.
Activate the Extension
On Window-> Extension, search for “omni.replicator.agent.camera.calibration”.
Enable the UI extension (omni.replicator.agent.camera_calibration).
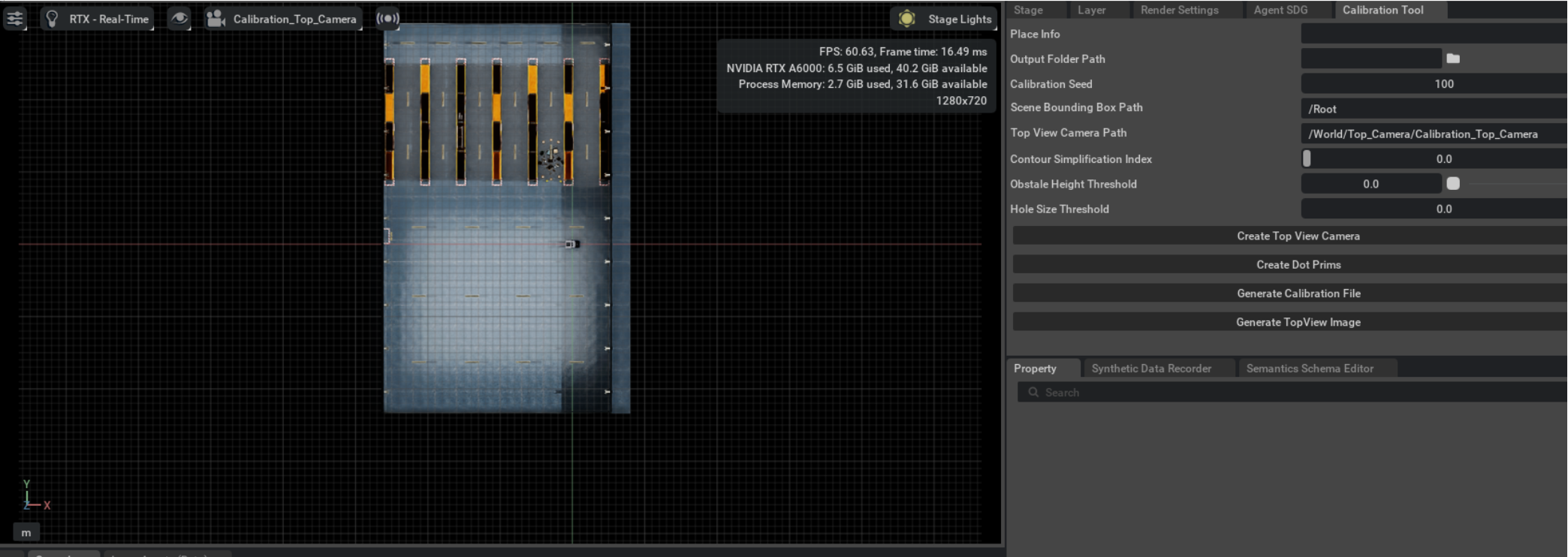
Calibration Tool Components
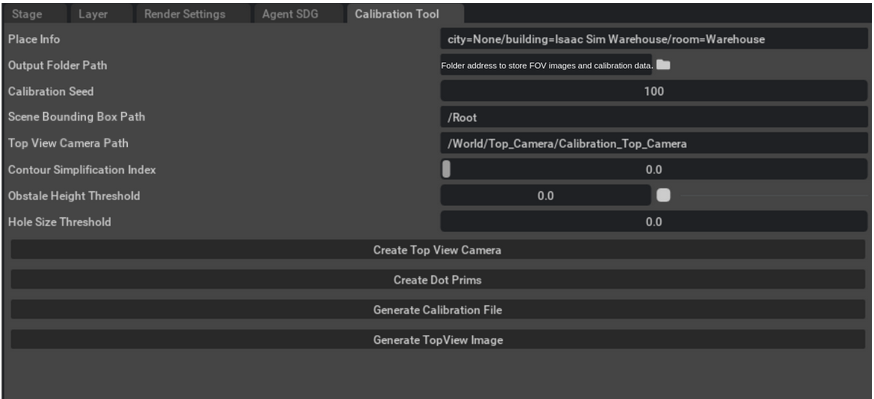
UI Layout
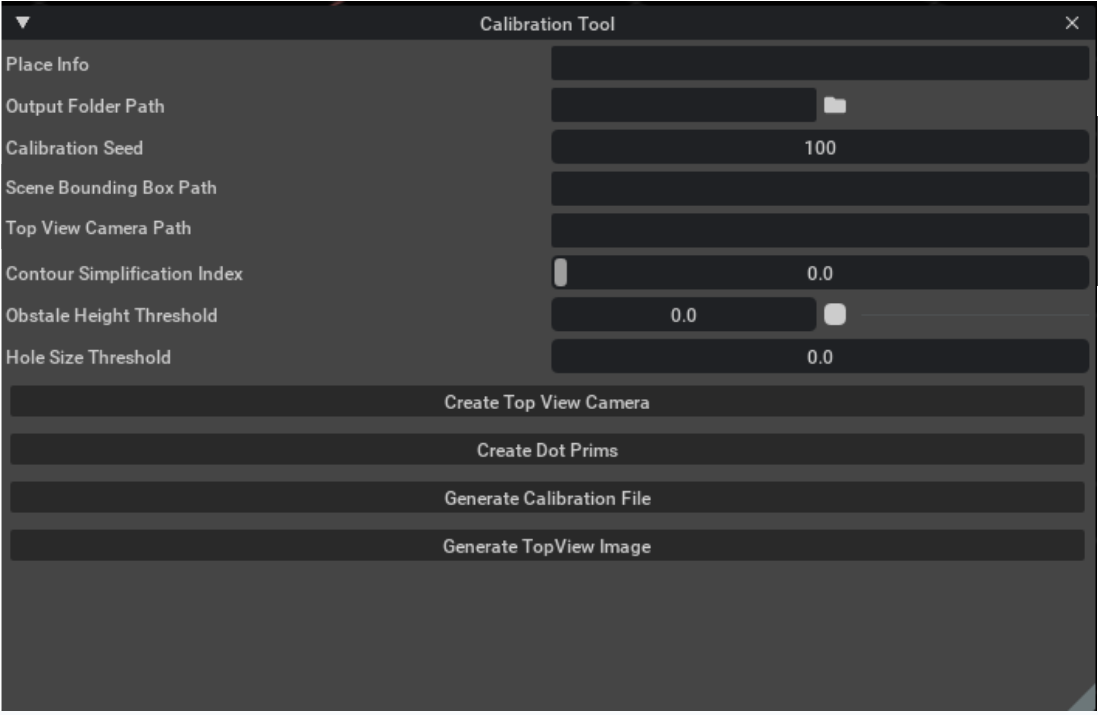
Input Fields
Place Info
Usage: Define place info in this field. Input is converted and recorded in the
calibration.jsonfile generated from the extension.Default value: empty string
Input Format:
city=[city name]/building=[building name]/room=[room name]Example:
Input:
city=Santa Clara/building=NVIDIA Voyager/room=Visitor LobbyOutput: (in the calibration.json file)
{ "place": [ { "name": "city", "value": "Santa Clara" }, { "name": "building", "value": "NVIDIA Voyager" }, { "name": "room". "value": "Visitor Lobby" } ], }
Output Folder Path
Usage: The address of the output information. Click on the folder icon to select the output folder address.
Default value: empty string
Calibration Seed
Usage: The seed that affects the density of the ray cast: As you inputs a higher value in this field, it results in the generation provide a more detailed FOV contour. A seed value of
NindicatesN * N, which indicates that rays are uniformly distributed from each camera.Default value: 100
Scene Bounding Box Path
Usage: Record the prim path of the root prim of the stage. It is used to calculate the top-view camera position.
Default value: empty string
Top View Camera Path
Usage: Record the prim path of the top-view camera. The view port of the top view camera is used to generate the top_view image.
Default value: empty string
Notice
The Top View Camera must be vertical to the ground and it must cover the position of all the calibration dots under the World/Calibration_Dots prim path and cameras under the World/Cameras prim path. Validatre that the Top View Camera has a rotation [0,0,0] with projection set to “orthographic”.
The Top View Camera must be 1080P
Obstacle Height threshold
Usage: Ignore obstacles whose height is less than the height threshold value in meters.
Default value (meter): 0
Contour Simplification Index
Usage: The index is employed to simplify the vertices on the contour using the Douglas-Peucker Algorithm. A larger value indicates a higher level of simplification.
Default value: 0 (no simplification)
Hole Size threshold
Usage: When generating data, disregard holes in the FOV polygon that are smaller than this threshold value. Holes are the areas that are not included in the FOV polygon.
Default value: 0 (maintain every hole on the FOV polygons)
Prerequisites
Before generating the calibration.json file and generating the top view image, you must meet the following prerequisites (Or an error message is thrown):
Top View Camera Path field is set up with a valid camera prim path, and the top view camera need to be an orthographic projection camera with rotation [0,0,0] .
The output folder path value is not empty.
The Place Info must be added and have the correct format.
To generate a calibration file for any camera, the camera must be set in the
/World/Camerasprim path.
Walkthrough
Here is a walk-through example that uses the calibration extension to generate camera calibration information. The Isaac Sim Full Warehouse: (.../Isaac/Environments/Simple_Warehouse/full_warehouse.usd) is used as the example scene. The following is an image of the environment:

Note
Stage unit must be in meters.
Make sure that there is a valid navmesh volume in the stage and that the navmesh only covers accessible areas.
Step 1
Add two cameras to the /World/Cameras path as sample cameras. Ideally, adjust the camera’s position so their view extends from the top to the ground.
You can use the people SDG panel by adjusting the Seed, setting Camera Number to 2, and clicking on Set Up Simulation to automatically generate two cameras in the Warehouse Scene.
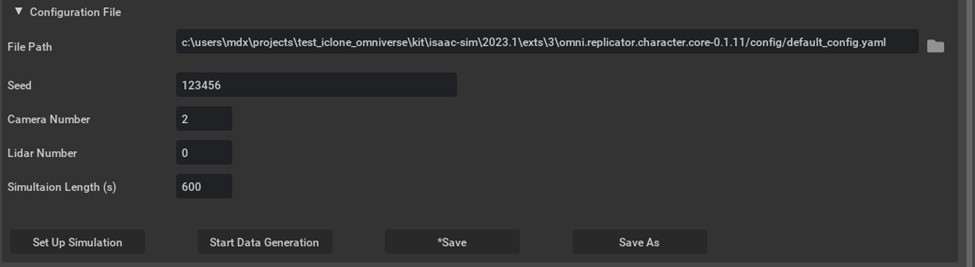
Alternatively, you can create cameras and the /World/Cameras Xform manually. This would be the hierarchy of the camera prims inside the stage.

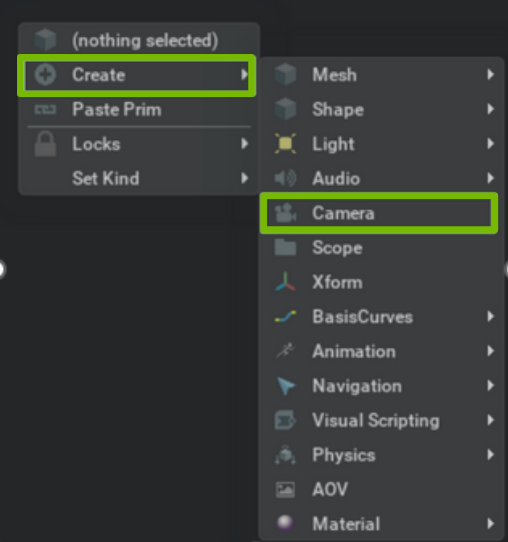
Tips: To create a camera in the stage manually, right-click the stage panel and then click Create -> Camera.
Step 2
This step is about generating a top view with “orthographic projection” camera and “section tool” extension.
Adjust the perspective camera’s height and view the scene from a far position.
Search “Section” in the Window -> Extension UI and enable the Section Tool Extension.
Navigate to the “Section” option located under the Tools menu. Click on the button to open the Section panel.
The “section tool” extension uses a horizontal plane to slice your scene.
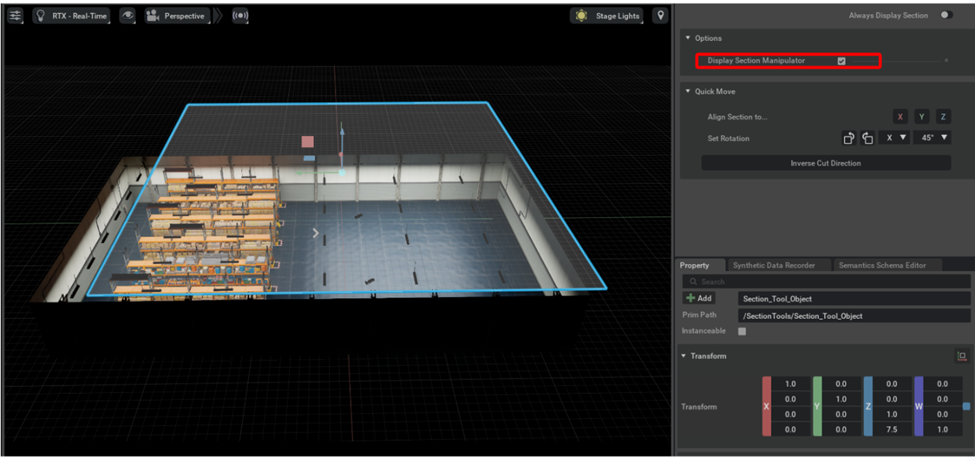
To create an optimal top view we would need to exclude objects like the ceiling, we can do so by manipulating the transform of the plane
/SectionTools/Section_Tool_Object.Uncheck Options-> Display Section Manipulator to hide the plane after an ideal top view is generated.
Add an orthographic projection top view camera to capture our top view image.
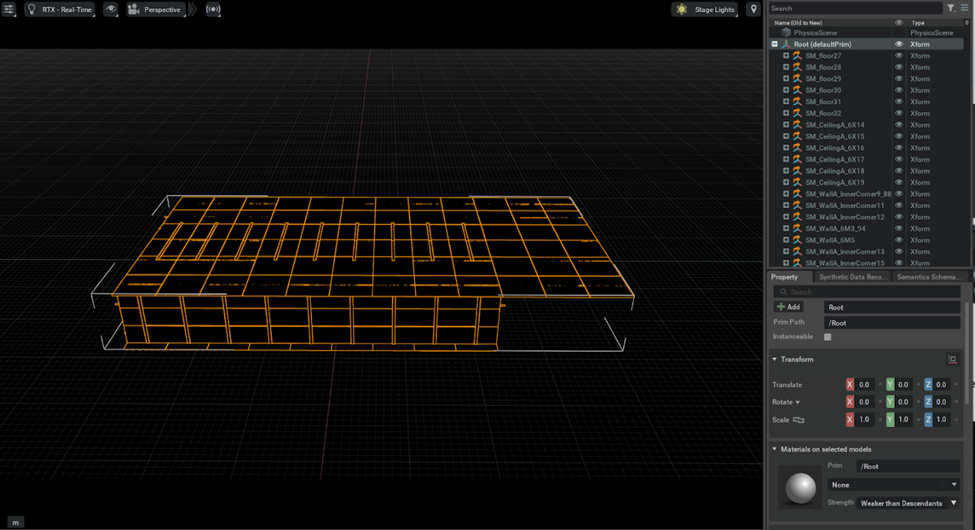
To add a camera on the stage as the top view camera, set
Scene Bounding Box Pathto/Root, then click Create Top View Camera.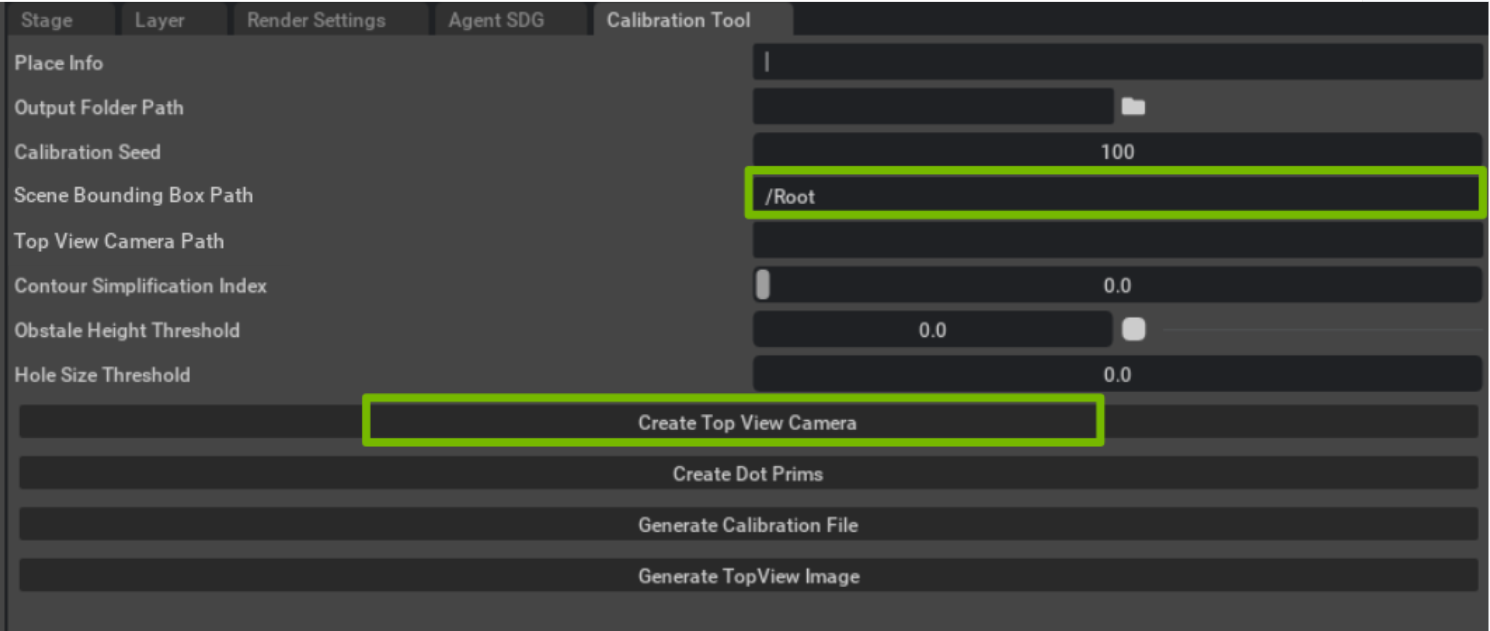
The
Top View Camera Pathis set automatically. You can then switch the viewport to top view camera.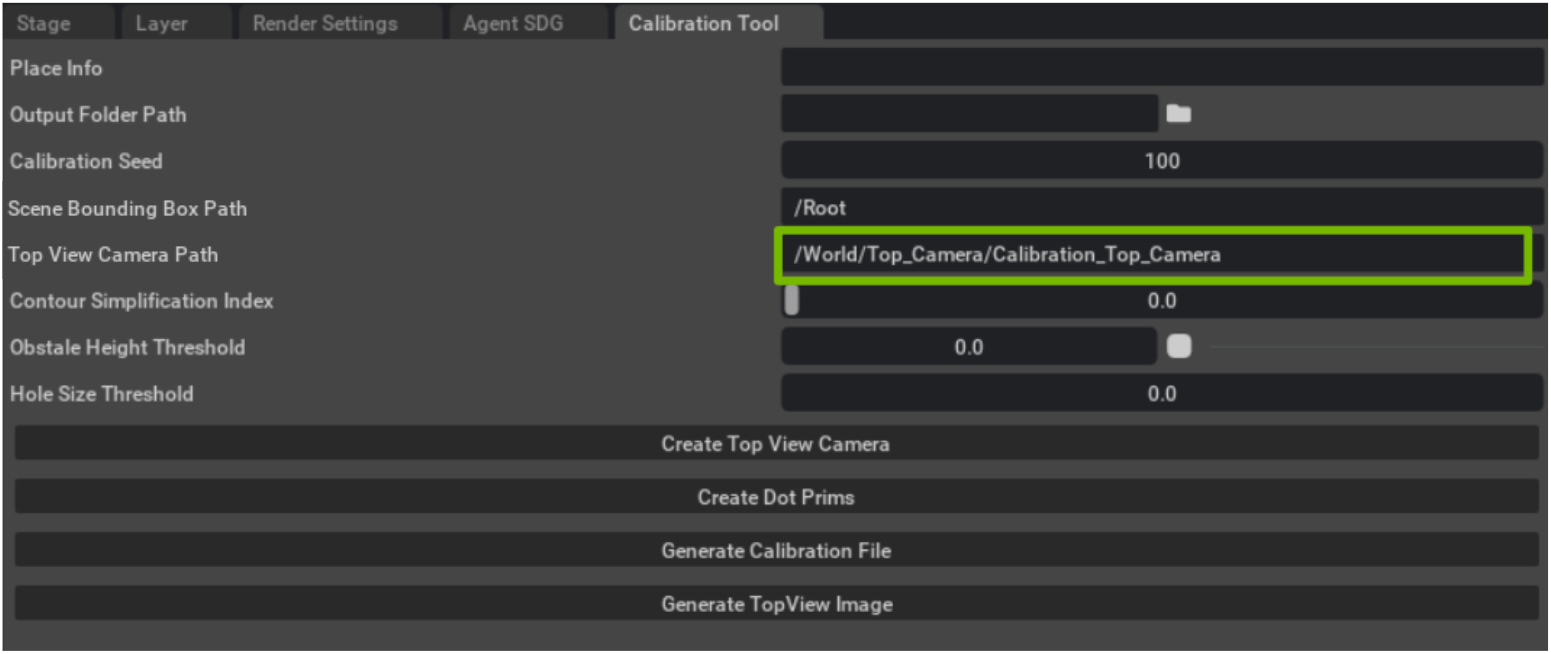
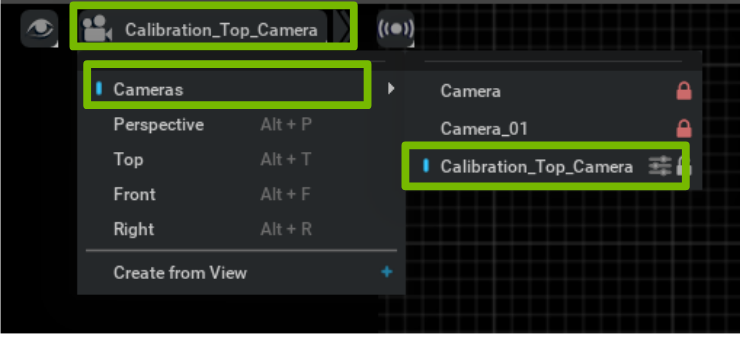
This should be the view after switching viewport to top view camera:
Tips: To switch the viewport to the top-view camera, click the Camera Icon, then click the Calibration_Top_Camera Camera.
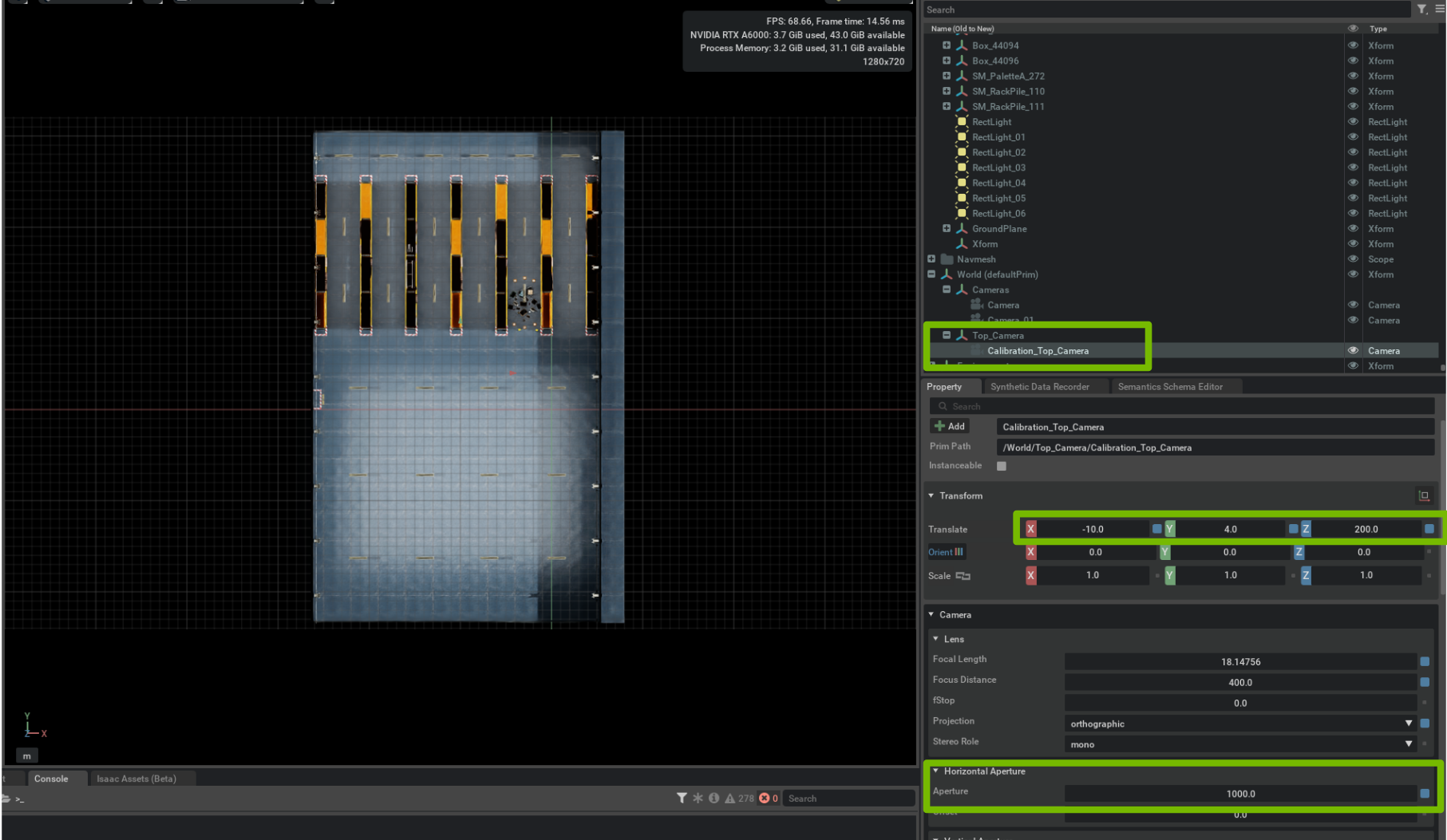
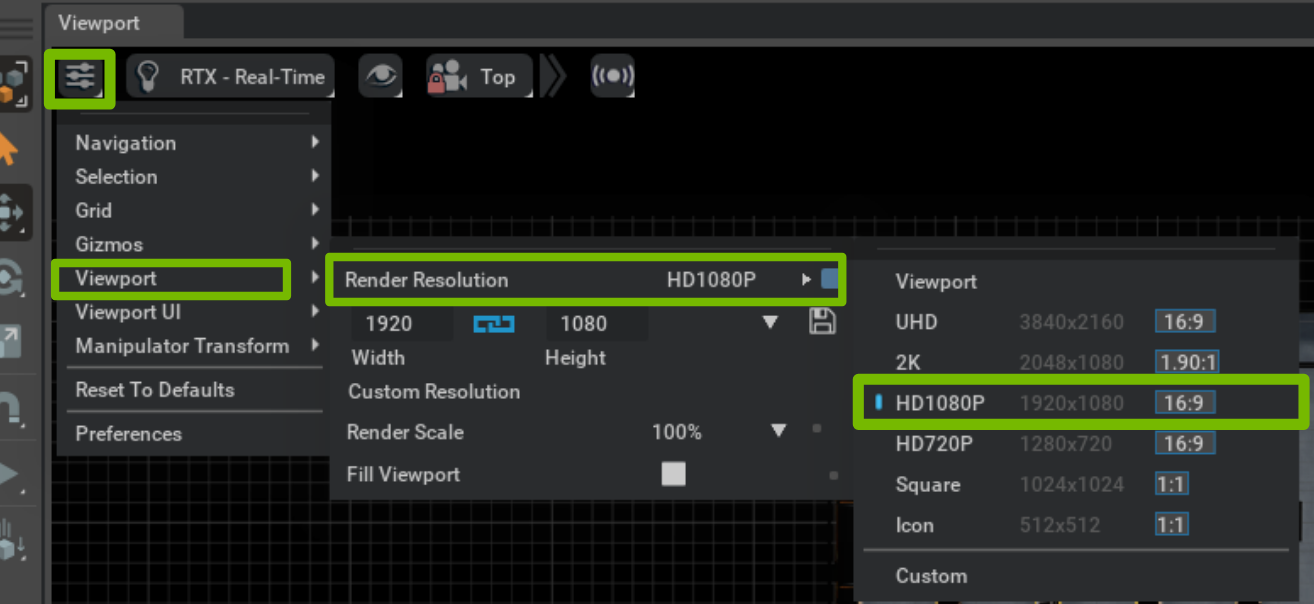
Adjust your viewport to 1080P, then change the Translate and Horizontal Aperture settings of the camera until it covers the entire scene.
Tips: To change the viewport to 1080P, click Settings -> viewport -> Render Resolution -> HD1080P.
Step 3
Input the scene information in the Calibration Tool panel:
Input place information in Place Info following the format:
For example,
city=None/building=Isaac Sim Warehouse/room=Warehouse
Select the output folder path by clicking on the folder icon.
Input the Calibration Seed, where the ideal range is 100 - 250. A higher value generates a more accurate FOV polygon.
Input the top camera path into the Top View Camera Path field.
For example,
/World/Top_Camera/Calibration_Top_Camera
Step 4
Generate Calibration Dots for each Camera by clicking on the Create Dot Prims Button.
Calibration dot prims are generated under “/World/Calibration_Dots” prim.
For each Camera prim under “/World/Cameras”, six calibration dots are generated. Those “Xform” prims are used to calculate the projection matrix for each camera.
All calibration dots are categorized under a parent prim that is named according to their target camera.
Note
You can switch your viewport to an arbitrary camera’s view to check whether all the calibration dots are visible.
Step 5
Generate a sample calibration file by clicking on “Generate Calibration File” button. This generates a
calibration.jsonfile at your output folder location.After the
calibration.jsonfile is generated. You can visualize the FOV in the stage by selecting your target camera.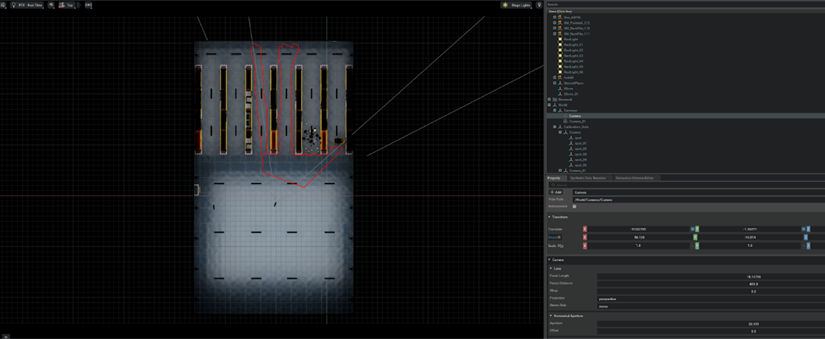
Step 6
To visualize the generated FOV polygon top view image, generate the image by clicking on Generate TopView Image button.
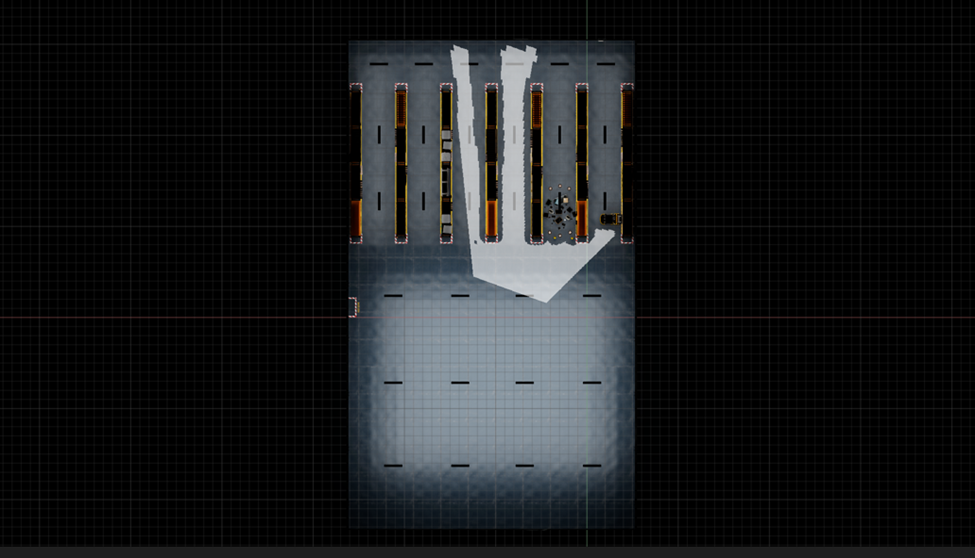
For each camera, the FOV is recorded as a semi-transparent white FOV polygon on the top view image. An``image.json`` file is also generated to record all created images within this generation progress.